Тахогенератор что это такое
Тахогенератор — Википедия
 Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель
Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель Тахогенера́тор (от др.-греч. τάχος — «быстрый», «скорость» и лат. generator «производитель») — электрическая микромашина, измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в однозначно связанный со скоростью электрический сигнал.
Обычно величина (ЭДС), а в некоторых типах тахогенераторов и частота сигнала прямо пропорциональны частоте вращения ротора.
Электрический сигнал тахогенератора подаётся либо для непосредственного отображения и считывания показаний на проградуированный в единицах скорости вращения вторичный прибор — индикатор тахометра, либо на вход автоматических устройств управления, регулирующих частоту вращения.
По принципу действия тахогенераторы делятся на несколько типов — с выходным сигналом переменного тока или напряжения (синхронные и асинхронные) и с выходным сигналом постоянного тока.
Тахогенераторы постоянного тока[править | править код]
Сравнение синхронного тахогенератора постоянного тока с синхронным тахогенератором переменного тока.Желтый — постоянного тока
Синий — переменного тока
Небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
Эти тахогенераторы представляют собой обычные коллекторные генераторы постоянного тока, но с постоянным возбуждением, как правило осуществляемого постоянными магнитами статора. Так как ЭДС, наводимая в обмотках ротора, прямо пропорциональна скорости изменения магнитного потока в обмотках в соответствии с законом Фарадея, то и напряжение, снимаемое со щёток коллектора оказывается прямо пропорциональным скорости вращения ротора.
Из-за наличия щёточно-коллекторного узла ресурс и надёжность данного типа тахогенераторов меньше, чем например у тахогенераторов переменного тока, а из-за процесса коммутации пластин коллектора и щёток при вращении порождаются дополнительные электрические импульсные помехи выходного сигнала тахогенератора.
Информационным сигналом тахогенератора постоянного тока является электрическое напряжение, что вызывает дополнительные ошибки преобразования скорости, обусловленные, в основном, зависимостью магнитного потока подмагничивания от температуры, переходного электрического сопротивления между щётками и коллектором, изменения магнитного потока подмагничивания постоянного магнита статора со временем из-за саморазмагничивания и изменения зазора между ротором и статором.
Достоинствами тахогенераторов постоянного тока являются удобная форма представления выходного сигнала и возможность определять не только скорость вращения ротора, но и направление его вращения (при смене направления вращения выходной сигнал меняет полярность).
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэффициентом преобразования» или «крутизной тахогенератора» и обычно указывается в технической спецификации тахогенератора в милливольтах на оборот в минуту. По этому параметру и выходному напряжению можно определить частоту вращения ротора по формуле:
- Frot=UoutSt,{\displaystyle F_{rot}={\frac {U_{out}}{S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в оборотах в минуту,
- Uout{\displaystyle U_{out}} — выходное напряжение тахогенератора,
- St{\displaystyle S_{t}} — коэффициент преобразования.
Асинхронные тахогенераторы переменного тока[править | править код]
По конструкции подобны асинхронным электродвигателям с короткозамкнутым ротором. Короткозамкнутый ротор обычно выполнен в виде полого алюминиевого или медного цилиндра. На статоре такого тахогенератора с магнитными потоками, ориентированными относительно друг друга под углом 90°, расположены две обмотки, одна из которых (обмотка возбуждения) питается переменным синусоидальным током постоянной частоты и постоянной амплитуды, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр переменного напряжения, отградуированный, например, в об/мин), либо вход автоматической системы управления.
Принцип действия основан на увлечении магнитного потока, наведенного в роторе короткозамкнутым ротором при его вращении. При неподвижном роторе, так как магнитные поля обмотки возбуждения и выходной обмотки взаимно перпендикулярны, выходное напряжение равно нулю. При вращении ротора эта перпендикулярность нарушается и в выходной обмотке наводится ЭДС, пропорциональная скорости вращения.
Так как частота выходного напряжения не зависит от частоты вращения ротора и равна частоте напряжения в обмотке возбуждения, такой тип тахогенератора и называется асинхронным.
Асинхронный тахогенератор также позволяет определять направление вращения ротора, при смене направления фаза выходного сигнала изменяется на 180°.
Синхронные тахогенераторы переменного тока[править | править код]
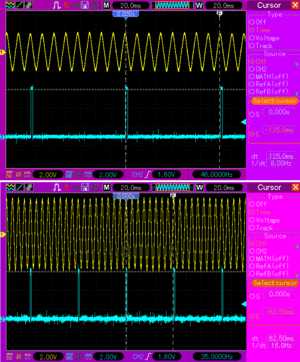 Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора.
Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора. Жёлтый — выход 16-полюсного тахогенератора.
Синий — датчик положения ротора (1 импульс на 1 оборот).
частоты вращения:
сверху 8 Гц, снизу 16 Гц
Представляют собой бесколлекторные синхронные машины с ротором, подмагниченным постоянным магнитом. На статоре расположены одна или несколько обмоток.
Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого прямо пропорциональны скорости вращения ротора.
Недостаток синхронного тахогенератора — невозможность определения направления вращения, что в некоторых применениях нежелательно.
Часто ротор выполняют в виде многополюсного постоянного магнита, поэтому на 1 оборот ротора генерируется несколько периодов выходного сигнала.
Измерения скорости вращения допустимо двумя способами — частотным и амплитудным.
Синхронные и асинхронные тахогенераторы обладает бо́льшим сроком службы по сравнению с тахогенераторами постоянного напряжения, так как в них отсутствуют коллекторно-щёточный узел.
Частотный способ определения скорости вращения[править | править код]
Так как частота выходного сигнала не зависит от температуры, уменьшения магнитного потока вызванного старением и величины зазора между ротором и статором тахогенератора, то этот способ является одним из самых точных.
Скорость вращения вычисляется путём определения частоты выходного сигнала и дальнейшим вычислением частоты вращения ротора по формуле:
- Frot=Foutp,{\displaystyle F_{rot}={\frac {F_{out}}{p}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора в Гц,
- p{\displaystyle p} — число пар полюсов ротора тахогенератора.
Недостатком частотного метода является то, что для более точного определения скорости необходимо больше времени, и за это время скорость может значительно измениться. Из этого следует, что чем больше времени тратится на накопление импульсов для определения частоты, тем больше динамическая погрешность в измерениях, поэтому в следящих системах автоматического регулирования скорости вращения происходит запаздывание реакции на возмущение и это в некоторых применениях нежелательно.
Для снижения динамической погрешности используют тахогенераторы с бо́льшим числом полюсов, это позволяет сократить время определения выходной частоты, а значит и время реакции управляющей системы авторегулирования.
Определить частоту сигнала можно из накопленных и усредненных периодов нескольких импульсов. Расчет производится по формуле:
- Fout=NT1+...+TN=N∑i=1NTi,{\displaystyle F_{out}={\frac {N}{T_{1}+...+T_{N}}}={\frac {N}{\sum _{i=1}^{N}T_{i}}},}
- где Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора,
- N{\displaystyle N} — число накопленных импульсов,
- T{\displaystyle T} — длительность периода.
При таком способе определения скорости вращения надо учитывать, что амплитуда выходного сигнала тоже меняется, а значит вход частотного детектора должен быть спроектирован для приема входного сигнала с изменяющейся в широких пределах амплитудой, что иногда является недостатком из-за усложнения схемы.
Амплитудный способ определения скорости вращения[править | править код]
Результат работы простой схемы выпрямления и фильтрации переменного напряжения: кремниевый диодный мост и RC цепь.Желтый — сигнал после диодного моста.
Синий — сигнал после RC цепи.
Видно резкое ускорение и плавное торможение.
Такой способ определения частоты не очень точен из-за зависимости от температуры, зазора между ротором и статором, от изменений магнитного потока магнита ротора при старении, а также из-за влияния частотной интермодуляции на реактивные элементы цепи. Но, в ряде случаев, данный способ оправдывает себя, компенсируя недостатки простотой схемы управления.
По мере увеличения скорости вращения, ЭДС, генерируемая в обмотке статора СТГ, будет возрастать. Для снятия показаний с тахогенератора и приведения их к удобной форме используется одно- или двухполупериодный выпрямитель и НЧ фильтр, сглаживающий пульсации.
Отношение напряжения к частоте вращения ротора описывает параметр крутизна выходного напряжения, или коэффициент преобразования, представляемый обычно в mV/RPM{\displaystyle mV/RPM} (милливольт на оборот в минуту). По этому параметру можно определить частоту вращения ротора по формуле:
- Frot=Uout60St,{\displaystyle F_{rot}={\frac {U_{out}}{60S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Uout{\displaystyle U_{out}} — выходное действующее напряжение с тахогенератора,
- St{\displaystyle S_{t}} — крутизна выходного напряжения в mV/RPM{\displaystyle mV/RPM}.
Достоинства:
- Пара тахогенератор — тахометр не требует дополнительных источников питания, просто и достаточно надёжно в работе.
Недостатки:
- Тахогенераторы не могут измерять очень медленное вращение — амплитуда генерируемого сигнал становится очень малой.
- Тахогенераторы создают дополнительную крутящий момент трения на вращающийся вал, что вносит некоторую ошибку в измерения, но обычно она несущественна.
- Содержат трущиеся детали, и поэтому требуют периодическое техническое обслуживание.
С развитием электроники тахогенераторы все чаще заменяются на импульсные датчики, например, схемы с оптронами открытого типа, формирующие импульсы при отражении пучка света от контрастных меток на валу или на прерывания луча света обтюратором — крыльчаткой связанной с валом — датчики угла поворота (энкодеры), либо импульсные индукционные датчики, датчики Холла и прочие подобные импульсные электронные датчики.
Тахогенераторы. Виды и устройство. Работа и применение
Тахогенераторы это электрические машины небольшой мощности, которые служат для превращения частоты вращения вала в сигнал электрического тока на выходе. При соединении вала тахогенератора с валом исследуемого агрегата можно получать значение числа его оборотов вращения по имеющемуся значению напряжения на выходе. Эта величина напрямую зависит от числа оборотов рабочего вала.
Виды и устройство
- Индукционные, постоянного тока.
- Синхронные.
- Асинхронные.
Индукционные тахогенераторы
Такие устройства подобны генераторам постоянного тока, имеющим независимое возбуждение с помощью постоянных магнитов. Для них характерно изменение значения передаточного коэффициента. Это возникает вследствие нелинейности сопротивления прилегания щеток. Реагирование якоря образует неравномерную магнитную индукцию в промежутках генератора. Это особенно заметно при незначительной скорости.
Уменьшение нелинейности происходит путем применения омедненных металлизированных щеток. При использовании таких щеток наблюдается незначительное падение напряжения. Нелинейность вследствие реакции якоря уменьшается вследствие понижения скорости и возрастания сопротивления потребителя нагрузки.
На качество функционирования этого устройства влияют погрешности в технологии изготовления и особенности конструкции, включающие в себя:
- Импульсные перепады напряжения в коллекторе. На них влияет число пластин в устройстве коллектора.
- Зубчатое устройство якоря.
- Оборотные пульсации из-за несимметрии воздушных промежутков.
При небольшом числе оборотов вала из-за вышеперечисленных погрешностей возникает искажение сигнала на выходе, снижается частота и увеличивается амплитуда. Это ограничивает нижний предел скорости тахогенератора. Для того, чтобы сделать работу более качественной и сгладить пульсации, в устройстве тахогенератора используют как можно больше количество пластин в коллекторе. А также применяются якоря со специальными пазами, имеющими особенность в устройстве, в них есть скос на 1 деление зуба. За счет этого возрастает воздушный зазор.
Чтобы повысить точность устройства, в тахогенератор устанавливают якорь без пазов. Пульсации снижают путем подключения конденсаторов, которые выступают фильтром высокой частоты.
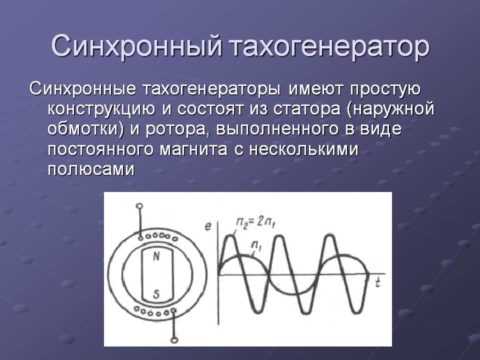
Синхронные тахогенераторы
Эти устройства по внешнему виду похожи на маломощный синхронный электродвигатель с магнитным и электрическим возбуждением, имеющие маленький ротор, играющий роль магнита. Для выравнивания частоты и амплитуды, зависящей напрямую от оборотов вращения, применяются выпрямители на основе полупроводниковых приборов.
Такой вид тахогенератора работает с переменной частотой, что затрудняет его использование в простых схемах. Он имеет низкую чувствительность к возможности изменения направления крутящего момента вала электродвигателя. В устройствах тахогенераторов синхронного типа выполняют значительное число пар полюсов, поэтому они используются для приводов механизмов с малой скоростью вращения.
Причины погрешности:
- Выходное напряжение имеет зависимость от величины сопротивления цепи.
- Несимметричность воздушного зазора обуславливает появление пульсаций низкой частоты.
- В магнитном потоке присутствуют пульсации от зубьев.
- Изменение температуры влияет на параметры машины.
Для нормального функционирования синхронных тахогенераторов подойдут такие же меры и условия, как для электрических устройств постоянного тока. Импульсы напряжения уравниваются путем использования устройства ротора со специальными полюсами, обеспечивающими необходимую ЭДС. Чтобы уменьшить зубцовые пульсации, применяют сглаживающий фильтр.
Из преимуществ синхронных тахогенераторов можно отметить:
- Устойчивость к вибрациям.
- Защита от пыли и влаги.
- Взрывобезопасносная конструкция.
Асинхронные тахогенераторы
Конструкция асинхронного тахогенератора похожа на устройство 2-фазного исполнительного электродвигателя, имеющего тонкостенный замкнутый ротор. Питание тахогенератора, а точнее его обмотки возбуждения, производится от электросети переменного тока.
Выходная обмотка образует двойную ЭДС. 1-я из них имеет величину переменного тока внутри ротора, 2-я ЭДС – вращения снаружи ротора. 1-я ЭДС образует суммарный магнитный поток под действием токов. При действии 2-й ЭДС токи образуют магнитный поток в катушках тахогенератора – выходы ЭДС.
Амплитуда и частота графика синусоиды сети напрямую зависит от скорости вращения ротора тахогенератора. Для смены направления вращения нужно изменить фазу выхода на противоположную.
Применение тахогенераторов стало популярным в автоматических системах в качестве безинерционного устройства. В схемах, в которых значение выхода является поворотным углом, тахогенераторы работают в качестве дифференциатора. В схеме тахогенератора инерция электромагнитов используется в качестве дополнительного апериодического звена.
Требования к тахогенераторам
- Зависимость напряжения выхода от скорости вращения вала электромотора должна быть равна характеристике линейного вида.
- Характеристика выхода должна быть устойчивой к воздействию внешней среды: давления, влажности, температуры.
- Когда вал тахогенератора стоит на месте, выходное напряжение должно показывать минимальную величину (остаточное напряжение).
- Напряжение должно быть равным при условии вращения как в одну сторону, так и в другую (симметричные величины).
- Импульсы напряжения на выходе не должны создавать помех, которые образуются от электромагнитных процессов при функционировании, и быть наименьшими.
- Мощность на выходе тахогенератора должна быть совместимой с нагрузкой потребителя, чтобы ее было достаточно для нормальной эксплуатации.
Применение тахогенераторов
- Вольтметр совместно с тахогенератором образуют конструкцию тахометра для замера числа оборотов вращения электродвигателя.
- Тахогенератор с насаженной на его вал крыльчаткой может выполнять работу расходомера жидкости, которая протекает по трубопроводу.
- Применяется в конструкции шлифовального станка, на котором установлен датчик контроля линейной допустимой скорости вращения абразивного круга. При достижении кругом наибольшего допустимого значения скорости, датчик, выполненный на основе тахогенератора, автоматически отключает привод станка и отводит абразивный круг от детали, предотвращая этим разрыв круга, и обеспечивая безопасную работу для станочника.
В последнее время внедряется и разрабатывается множество электронных устройств, подобных тахогенератору. Например, приборы, собранные на оптронах, которые реагируют на прерывание световых лучей крыльчаткой, вращающейся на валу устройства, подобного тахогенератору. Также работают фотоимпульсные датчики, бесконтактные датчики индукционного типа, датчики Холла и другие. Постепенно тахогенераторы заменяются вновь разработанными инновационными устройствами.
Похожие темы:
Тахогенератор - это... Что такое Тахогенератор?
 Тахогенератор
Тахогенератор Тахогенера́тор (от др.-греч. τάχος — быстрота, скорость и генератор) — измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в пропорциональный электрический сигнал.
Величина сигнала (ЭДС) прямо пропорциональна частоте вращения.
Сгенерированный сигнал подаётся для непосредственного отображения на специально проградуированный вольтметр (тахометр) либо на вход автоматических устройств, отслеживающих частоту вращения.
Принцип действия
Действие тахогенератора основано на пропорциональности угловой частоты вращения ротора генератора его ЭДС при постоянном значении потока возбуждения.
Различают тахогенераторы переменного тока (синхронные и асинхронные) и постоянного тока.
- Тахогенераторы постоянного тока — небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
- Тахогенераторы синхронного типа представляют собой небольшие синхронные машины с постоянным магнитом в качестве ротора.
- Асинхронные тахогенераторы (получили наибольшее распространение) по конструкции подобны асинхронным электродвигателям с полым короткозамкнутым ротором. На статоре такого тахогенератора расположены под углом 90° две обмотки, одна из которых (обмотка возбуждения) питается переменным током постоянной частоты и постоянного напряжения, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр, отградуированный, например, в об/мин).
Достоинства
- Пара тахогенератор — тахометр не требует дополнительных источников питания, проста и достаточно надёжна в работе.
Недостатки
- Тахогенераторы не могут измерять очень медленное вращение — получающийся сигнал чересчур мал.
- Тахогенератор создаёт дополнительную нагрузку на вращающийся вал и содержит трущиеся детали, требующие регулярного ухода. (С развитием электроники тахогенераторы заменяются на схемы с оптронами открытого типа, реагирующими на отражение света от меток на вале или на прерывания луча света крыльчаткой, размещённой на валу — датчики угла поворота (энкодеры)).
См. также
Литература
- Арменский Е. В., Фалк Г. Б. Электрические микромашины: Учебное пособие для студ. электротехнических специальностей вузов. — 3-е, перераб и доп. — М.: Высшая школа, 1985. — 231 с. — 22 000 экз.
Ссылки
Тахогенераторы Постоянного Тока: Принцип Работы, Применение

Рабочий тахогенератор
Несомненно, развитие человечества в последние столетия неразрывно связано с освоением источников энергии и их эффективным применением. Более того, можно сказать, что уровень развития той или иной страны напрямую зависит от объема производимой энергии.
Первым источником энергии, совершившим промышленную революцию, стал пар, но вскоре его гегемония сменилась на власть электрических машин. Сегодня мы с вами поговорим про тахогенераторы постоянного тока — устройства, внесшие огромную лепту в прогресс человечества.
Немного исторической информации
19 век стал для человечества поворотной точкой в истории. Он знаменателен величайшими научными открытиями, в том числе и в электротехнике.
Майкл Фарадей – открыватель закона об электромагнитной индукции
- В то далекое время известный английский физик-экспериментатор Майкл Фарадей открывает закон электромагнитной индукции. Это событие и можно считать отправной точной в электрификации планеты. Дальнейшее развитие и практическое применение этих знаний было лишь вопросом времени.

Борис Семенович Якоби – вклад русских ученых в развитие электричества, пожалуй, самый весомый
- В 1834 году русский физик Б.С. Якоби представил миру конструкцию первой электрической машины, ставшую, как потом оказалось, прототипом всех современных электродвигателей.

Павел Николаевич Яблочков
- Следующим существенным шагом стало появление трансформаторов и их практическое использование. В 1876 году это открытие сделал русский ученый П.Н. Яблочков. Он же изобрел электрические свечи и доказал практическую пользу и безопасность применения переменного тока.
Интересно знать! До изысканий Яблочкова всем научным мировым сообществом считалось, что использовать переменный ток невозможно и опасно.

Михаил Осипович Доливо-Добровольский
- В 1889 году русский инженер М.О. Доливо-Добровольский изобретает трехфазный асинхронный двигатель, благодаря чему электрические машины в промышленности стали применяться наиболее широко. Конструкция данного аппарата была крайне простой и одновременно надежной.
- В итоге к началу 20-го века уже были созданы все основные виды электрических машин, которые активно применяются и по сей день. Их используют в разных отраслях промышленности и приборах.
Микромашины в электротехнике
Помимо мощных агрегатов также потребовались и машины малой мощности, называемые еще микромашинами. Они активно применяются в устройствах вычислительной техники и автоматики в качестве функциональных элементов.
- Эти типы устройств принято делить на три группы: электромашинные усилители, исполнительные двигатели и информационные машины.
- Первые служат для усиления мощности электрических сигналов.
- Исполнительные двигатели занимаются преобразованием электрического тока в механическую силу. Эти аппараты могут быть асинхронными, шаговыми и постоянного тока.

На фото — тахогенератор
- Информационные машины состоят из тахогенераторов, сельсин, магнесин и вращающихся трансформаторов. Назначение этих устройств – преобразование величин неэлектрической природы в электрические сигналы. В частности, тахогенератор постоянного тока измеряет скорость вращения некоего объекта и применяется он в различных устройствах электропривода, станках, транспорте и прочем.
Принцип работы тахогенераторов и их строение
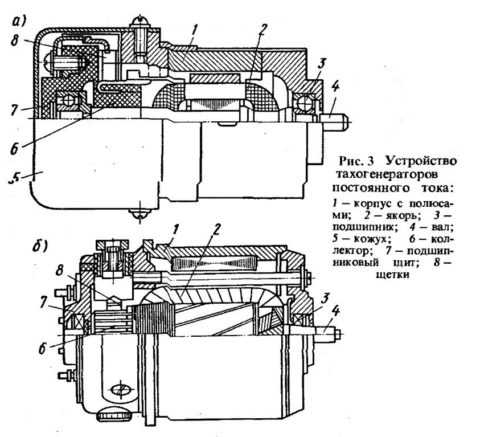
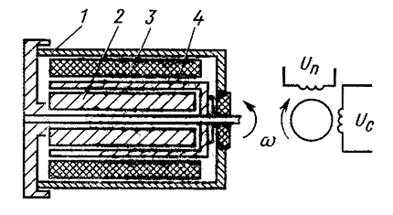
Схематическое строение тахогенератора постоянного тока
Тахогенератор – устройство оборудованное валом, которое, при его вращении, выдает на выходе электрическое напряжение, величина которого прямо пропорциональна скорости, с которой вал вращается. Эта особенность означает, что двигатель постоянного тока с тахогенератором, по сути, оснащен датчиком, с постоянными магнитами или независимым внешним возбуждением.

Бензиновый генератор постоянного тока работает по такому же принципу, что и тахогенератор
- Конструкция тахогенератора практически неотличима от конструкции других машин постоянного тока. Используют их для измерения частоты вращения по значению выходного напряжения и для получения электрического сигнала с частотой вращения вала в схемах авто регулирования.
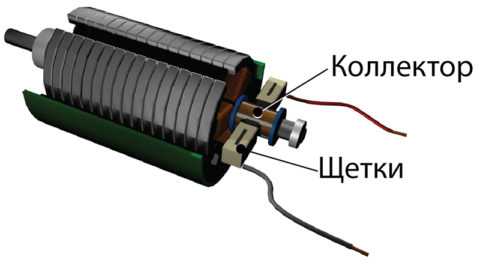
На схеме – классический скользящий контакт
- Съемка напряжения происходит через скользящий контакт, который традиционно состоит из медного коллектора и графитовых щеток.
- У такой конструкции есть особенность, что, из-за того, что на меди образуется оксидная пленка, может с некоторой периодичностью меняться сопротивление контакта. По этой причине происходят колебания напряжения выдаваемого тахогенератором, которые воспринимаются в виде шума.
Интересно знать! На низких оборотах шумы тахогенератора сравниваются с полезным сигналом.
- Несмотря на этот недостаток, данная конструкция остается самой популярной, так как графит обладает отличными скользящими свойствами, а значит, устройство служит значительно дольше, чем аналоги.
- Если требуется тахогенератор, лишенный указанного недостатка, то на коллектор наносят контактную дорожку из серебра. Этот металл не окисляется, а значит, показания сопротивления всегда остаются на одном уровне.
Тахогенераторы Long Life

Тахогенератор Лонг Лайф
Особняком стоят тахогенераторы, собранные по «Long life». Эти устройства предназначены для работы в тех сферах, где требуется длительная бесперебойная работа. Они невероятно износоустойчивы, поэтому служат очень долго.
- Технические характеристики тахогенераторов переменного тока данного типа впечатляют. Диапазон рабочих температур от -50 до +100 градусов по Цельсию. Возможность измерения скорости вращения с точностью 1:100000 в режиме реального времени.
- Цилиндр у этих устройств может быть полым или цельным.
- Крепление вала фланцевое или лаповое.
Схемы постоянной автоматики
Итак, мы уже говорили, что тахогенераторы используются в автоматических схемах, теперь давайте подробнее разберем, как они там задействованы.
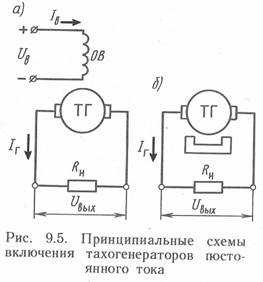
Схема включения тахогенератора постоянного тока
- Выше показана принципиальная схема подключения тахогенератора.
- Обмотка ОВ подключается к источнику постоянного тока. При этом тахогенератор, приходя в состояние возбуждения, и если его якорь приводится в движение с некой частотой, на выходе он начнет выдавать постоянное напряжение.
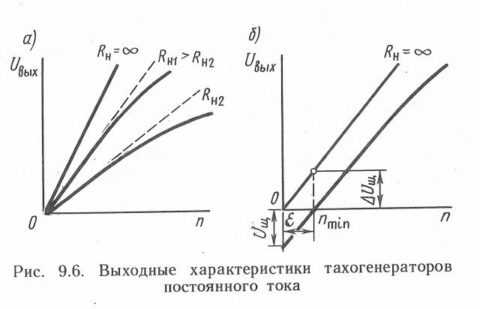
- При этом чем больше сопротивление прибора Rh, тем круче характеристика Сu на выходе. Значение наибольшей крутизны будет соответствовать холостому режиму работы тахогенератора – случается это когда обмотка у якоря размыкается.
- Соответственно, при росте нагрузки наблюдается обратное явление.
- Тахогенератор выдает на выходе характеристику тока в виде постоянной линии, но соответствует это действительности только на низких оборотах вращения. Если их увеличить, характеристика станет криволинейной. Если при этом уменьшается сопротивление нагрузки RH эффект кривизны также будет расти.
- Объясняется это тем, что якорь оказывает размагничивающее действие.
Совет! Чтобы генератор не выдавал криволинейную выходную характеристику, не нужно запускать его на максимально возможных оборотах, а в качестве нагрузки использовать только приборы, внутреннее сопротивление которых небольшое.
Строение синхронного тахогенератора
- Также стоит учитывать момент, что в реальных условиях наблюдается падение напряжения в щетках, из-за чего выходная характеристика идет не из начала координат, а с некоторым смещением. Данное явление – причина появления у тахогенераторов зоны нечувствительности, в которой не создается напряжение.
- Чтобы уменьшить зону нечувствительности применяют щетки с малым сопротивлением, обычно медно-графитовые или серебряно-графитовые. В моделях высокой точности используют щетки с серебряными или золотыми напайками. Однако все равно эти приборы имеют некоторую погрешность, в пределах 0,2-0,5%.
Асинхронный тахогенератор
Схематическое строение асинхронного тахогенератора
Конструкция асинхронного тахогенератора точно такая же, как у асинхронного электродвигателя с немагнитным ротором (полым).
- Обмотка возбуждения статора подключается к источнику переменного тока, а выходное напряжение снимается с генераторной обмотки (ГО).
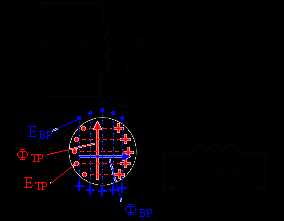
- Его принцип действия состоит в следующем – обмотка возбуждения запитывается переменным током некоторой частоты, в результате чего возникает пульсирующий магнитный поток, постоянно меняющий направление.
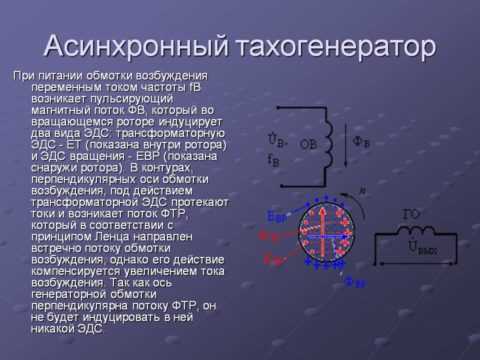
Что такое асинхронный тахогенератор
- Из-за воздействия данного магнитного поля во вращающемся роторе индуцируется два типа ЭДС – вращения и трансформаторная.
- На контурах, что перпендикулярны оси обмотки возбуждения, также начинают протекать токи, вызываемые ЭДС вращения. Эти токи также, пульсируя, индуцируют новую ЭДС – выходную.
- Если не углубляться в физические расчеты, то можно сказать, что асинхронный тахогенератор является несимметричным двухфазным агрегатом, который может быть исследован симметричными составляющими.
Погрешности асинхронных тахогенераторов
Выходное напряжение, выдаваемое данным типом тахогенераторов – комплексная величина, что говорит о фазовой и амплитудной погрешностях.
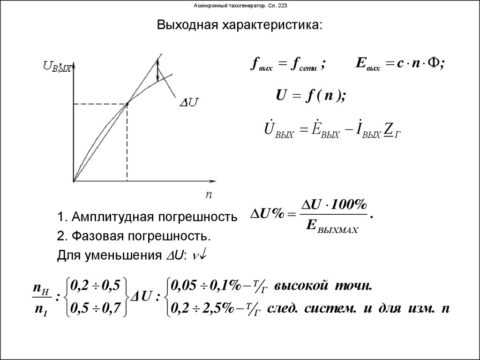
Расчет погрешностей асинхронного тахогенератора
- Фазовая погрешность – это отклонение в градусах фазы напряжения на выходе от базовой фазы напряжения, то есть напряжения возбуждения. Возникает данный эффект в основном за счет индуктивного сопротивления статора и в большей части ротора. Данный тип погрешности может быть уменьшен, за счет правильной подборки характеристики применяемой нагрузки.
- Амплитудная погрешность – это отклонение показаний напряжения от частоты вращения от идеального значения, в котором они должны быть равны. Выражается этот показатель в процентах.
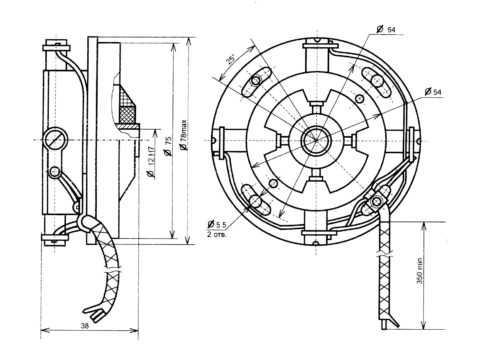
Чертеж тахогенератора
Также как и в случае фазовой погрешности, уменьшение данного эффекта возможно за счет правильной настройки и калибровки асинхронного тахогенератора.
- Физические причины амплитудной погрешности следующие. Во-первых, происходит падение напряжения в обмотке генератора. Во-вторых, меняется ток возбуждения, а следом за ним и магнитный поток, так как трансформаторная ЭДС ротора вызывает размагничивание. Третья причина – это то, что магнитный поток генераторной обмотки противостоит магнитному потоку вращения, из-за чего тот несколько уменьшается.
- Также стоит помнить, что ротор имеет некоторое индуктивное сопротивление, что также влияет на магнитный поток вращения, уменьшая его.
- И последнее – магнитный поток вращения индуцирует ЭДС вращения, а значит, появляются новый ток и магнитное поле, которое также противостоит потоку возбуждения. Данная электродвижущая сила является пропорциональной угловой скорости вращения, а значит, при увеличении частоты вращения ротора она тоже будет расти и противодействие усилится. Выражается это в падении напряжения в обмотке возбуждения и уменьшении магнитного потока вращения.
- Интересно, что одновременно понизить и фазовую и амплитудную погрешность невозможно. Поэтому схему подключения отлаживают так, чтобы снизить наиболее влияющие погрешности в конкретном случае.
Интересно знать! На практике доказано, что при низких оборотах вращения тахогенератора асинхронного типа оба типа погрешностей достаточно малы, из-за чего диапазоны вращения устройств ограничивают конкретными значениями.
Данные типы погрешностей хоть и являются основными, но они далеко не единственные:
- Нулевой сигнал – это напряжение, имеющееся на обмотке генератора в момент, когда ротор неподвижен. Данный параметр не остается постоянным, так как меняется при повороте ротора. Состоит он из двух составляющих: постоянно и переменной.
- Постоянная переменная возникает из-за неточного сдвига обмоток; присутствием короткозамкнутых контуров в обмотках и сердечнике; неодинаковой магнитной проходимости; неравномерного воздушного зазора; потоков рассеяния и прочего.
- Переменная составляющая обусловлена неравномерной толщиной стенок ротора, если он полый, из-за чего возникает разность активного сопротивления у контуров, а значит, и разность тока и магнитного потока.
- Чтобы ослабить постоянную составляющую нулевого сигнала, обмотки устанавливают на разных статорах: одна ставится на внутреннем, другая на наружном. При этом во время сборки асинхронного тахогенератора внутренний статор проворачивается, пока нулевой сигнал не достигнет минимального значения.
- Побороть переменную составляющую можно только калибровкой ротора, его симметричностью.
Выходные характеристики тахогенератора
- Следующая погрешность называется асимметрией выходного напряжения. Выражается она неравенством выдаваемых тахогенератором напряжений при вращении в разные стороны. Эффект особенно заметен при малых оборотах.
- Причина явления связана с остаточной ЭДС от нулевого сигнала, ведь его фаза остается постоянной, тогда как фаза вращения смещается на 180 градусов. Борются с проблемой за счет уменьшения нулевого сигнала.
- Последний вид погрешности является температурным. Влияние температуры окружающей среды, а также нагревания во время работы ротора, сказывается так, что изменяется активное сопротивление у обмоток на статоре и роторе. Все это сказывается, в свою очередь, на идеальном выходном напряжении, и увеличивает амплитудную и фазовую погрешности.
- Чтобы стабилизировать изменение сопротивления обмотки возбуждения, последовательно подключают терморезисторы. Ротор же изготавливается из материалов с максимально низким температурным коэффициентом.
В завершение
Итак, мы разобрали принципы и назначение тахогенератора. Устройства эти применяются для сугубо специфических целей, но, как стало ясно, их строение практически не отличается от классического генератора постоянного тока. Есть некоторые нюансы относительно точности прибора, но в остальном все сходится.
Просмотрите видео в этой статье, чтобы увидеть практическое применение этих агрегатов.
Тахогенераторы: принцип работы,виды,где используется | Компания "Вольт"
Устройство предназначено для моментального преобразования скорости ротора в пропорциональное значение электрического напряжения.
Тахогенераторы используются в качестве датчиков контроля и измерения скорости и являются информативной электрической машиной.
Они представляют собой микромашины для обеспечения стабильности технологических процессов и повышения качества получаемой продукции, а также для увеличения чувствительности систем, предназначенных для автоматического управления.
По своим конструктивным особенностям тахогенераторы аналогичны устройству конструкции электродвигателя постоянного тока. Возбуждение производится от постоянных магнитов и от электромагнитов.
Тахогенераторы
Принцип работы тахогенератора
Работа устройства заключается в пропорциональном отношении скорости вращения вала генератора к его электродвижущей силе (ЭДС). Величина потока возбуждения сохраняется неизменной.
Существуют тахогенераторы нескольких видов:
-
Тахогенераторы асинхронного типа.
-
Синхронные тахогенераторы, используемые в сети переменного тока.
-
Машины индукционные типа, с возбуждением от постоянного магнита (тока).
Индукционные тахогенераторы постоянного тока
Индукционные тахогенераторы постоянного тока
Устройства этого типа аналогичны машине постоянного тока с независимым возбуждением, осуществляемым от постоянных магнитов. Для этих машин характерна изменчивая величина передаточного коэффициента, это происходит по причине того, что щеточный контакт имеет нелинейное сопротивление. Реакции якоря, создает неравномерность магнитной индукции в зазорах генератора, особенно при малом и наибольшем значении скорости.
Снижение нелинейности происходит за счет использования металлизированных обмедненных щеток, для которых характерно малое падение значения напряжения. Нелинейность по причине реакции якоря понижается за счет ограничения скорости и повышением величины сопротивления нагрузки.
На качество работы данного устройства оказывают влияние погрешности в технологическом плане и из-за конструктивных особенностей тахогенератора. В них входят:
-
Пульсирующие скачки напряжения в коллекторе, зависящие от количества составляющих пластин коллектора.
-
Зубчатая конструкция якоря.
-
Несимметрия воздушного зазора влечет к оборотным пульсациям.
При невысокой скорости вращения из-за этих погрешностей происходит искажение выходного сигнала, понижение значения частоты и повышается амплитуда, что способствует ограничению скоростной нижней границы тахогенератора. Для повышения качества работы и сглаживания пульсаций, в конструкции тахогенератора применяют повышенное количество пластин в коллекторе. Также используются якоря, в конструкции которых применяются пазы, особенность ихзаключается в скосе на одно зубчатое деление. Воздушный зазор увеличивается.
Для достижения высокой точности, конструкция тахогенератора выполняется с якорем, в котором отсутствуют пазы. Дополнительное подключение конденсаторной батареи способствует снижению пульсаций, конденсатор служит в качестве высокочастотного фильтра.
Синхронные тахогенераторы
Синхронные тахогенераторы
Синхронные тахогенераторы аналогичны по внешнему виду синхронной машине малой мощности с магнитоэлектрическим возбуждением, небольших габаритных размеров, ротор, которой используется в качестве постоянного магнита. В этом случае для сглаживания амплитуды и частоты, которые по отношению к скорости вращения пропорциональны, используются полупроводниковые выпрямители.
Этот тип тахогенератора можно охарактеризовать переменной частотой, это представляет затруднение для применения в схемах стандартного предназначения, переменного тока. Он отличается нечувствительностью к изменению направления вращения вала двигателя. В синхронных тахогенераторах используется большое количество пар полюсов. По этой причине синхронные тахогенераторы применяются для электроприводов с небольшой скоростью вращения вала.
Основные причины, создающие погрешность тахогенераторов синхронного типа
-
Напряжение на выходе зависит от сопротивления измеряемой цепи.
-
Несимметрия воздушного зазора, она способствует возникновению низкочастотных пульсаций.
-
Магнитный поток сопровождается зубцовыми пульсациями.
-
Параметры машины зависят от температурных изменений.
Условия и меры, применяемые при эксплуатации синхронных тахогенераторов для компенсации погрешностей, аналогичны мерам, используемым для тахогенераторов постоянного тока. Пульсации выпрямленного напряжения выравниваются за счет изготовления конструкции ротора с полюсами специального профиля благодаря этому получается необходимая ЭДС. Снижение зубцовых пульсаций происходит за счет использования сглаживающего фильтра.
Достоинства синхронных тахогенераторов
-
Виброустойчивость.
-
Пыле и влагозащищенность.
-
Взрывобезопасность.
Асинхронный тахогенератор
Асинхронный тахогенератор
Тахогенератор асинхронного типа по конструктивным особенностям аналогичен двухфазному исполнительному электродвигателю с короткозамкнутым тонкостенным ротором «беличья клетка». Питание осуществляется от электрической сети напряжения переменного тока и подается на обмотку возбуждения.
Выходная обмотка наводит двойное ЭДС, первая ЭДС со значением переменного тока трансформаторного типа (изнутри ротора), вторая ЭДС, вращения (с внешней стороны ротора). Первая ЭДС под воздействием токов создает результирующий продольный магнитный поток. При воздействии второй ЭДС, токи создают свой магнитный поток, наводящий в обмотке тахогенератора – ЭДС выхода.
Частота и амплитуда синусоиды электрической переменной сети относится пропорционально к количеству оборотов вращения ротора генератора. Чтобы изменить направления вращения, необходимо поменять выходную фазу на противоположную.
Заключение
Использование тахогенераторов нашло применение в автоматических устройствах и в системах управления в виде без инерционного элемента. Для систем, в которых величина выхода является углом поворота, тахогенератор выступает в качестве абсолютного дифференциатора. В электрической цепи, к которой присоединен тахогенератор – электромагнитная инерция принимается в качестве добавочного апериодического звена.
Пишите комментарии, дополнения к статье, может я что-то пропустил.
Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Всего доброго.
- Печать
- по электронной почте
Тахогенератор — Википедия. Что такое Тахогенератор
 Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель
Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель Тахогенера́тор (от др.-греч. τάχος — «быстрый», «скорость» и лат. generator «производитель») — электрическая микромашина, измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в однозначно связанный со скоростью электрический сигнал.
Обычно величина (ЭДС), а в некоторых типах тахогенераторов и частота сигнала прямо пропорциональны частоте вращения ротора.
Электрический сигнал тахогенератора подаётся либо для непосредственного отображения и считывания показаний на проградуированный в единицах скорости вращения вторичный прибор — индикатор тахометра, либо на вход автоматических устройств управления, регулирующих частоту вращения.
Принцип действия
По принципу действия тахогенераторы делятся на несколько типов — с выходным сигналом переменного тока или напряжения (синхронные и асинхронные) и с выходным сигналом постоянного тока.
Тахогенераторы постоянного тока
Сравнение синхронного тахогенератора постоянного тока с синхронным тахогенератором переменного тока.Желтый — постоянного тока
Синий — переменного тока
Небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
Эти тахогенераторы представляют собой обычные коллекторные генераторы постоянного тока, но с постоянным возбуждением, как правило осуществляемого постоянными магнитами статора. Так как ЭДС, наводимая в обмотках ротора прямо пропорциональна скорости изменения магнитного потока в обмотках в соответствии с законом Фарадея, то и напряжение, снимаемое со щёток коллектора оказывается прямо пропорциональным скорости вращения ротора.
Из-за наличия щёточно-коллекторного узла ресурс и надёжность данного типа тахогенераторов меньше, чем например у тахогенераторов переменного тока, а из-за процесса коммутации пластин коллектора и щёток при вращении порождаются дополнительные электрические импульсные помехи выходного сигнала тахогенератора.
Информационным сигналом тахогенератора постоянного тока является электрическое напряжение, что вызывает дополнительные ошибки преобразования скорости, обусловленные, в основном, зависимостью магнитного потока подмагничивания от температуры, переходного электрического сопротивления между щётками и коллектором, изменения магнитного потока подмагничивания постоянного магнита статора со временем из-за саморазмагничивания и изменения зазора между ротором и статором.
Достоинствами тахогенераторов постоянного тока - удобная форма представления выходного сигнала и возможность определять не только скорость вращения ротора, но и направление его вращения (при смене направления вращения выходной сигнал изменяет полярность).
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэффициентом преобразования» или «крутизной тахогенератора» и обычно указывается в технической спецификации тахогенератора в милливольтах на оборот в минуту. По этому параметру и выходному напряжению можно определить частоту вращения ротора по формуле:
- Frot=UoutSt,{\displaystyle F_{rot}={\frac {U_{out}}{S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в оборотах в минуту,
- Uout{\displaystyle U_{out}} — выходное напряжение тахогенератора,
- St{\displaystyle S_{t}} — коэффициент преобразования.
Асинхронные тахогенераторы переменного тока
По конструкции подобны асинхронным электродвигателям с короткозамкнутым ротором. Короткозамкнутый ротор обычно выполнен в виде полого алюминиевого или медного цилиндра. На статоре такого тахогенератора с магнитными потоками, ориентированными относительно друг друга под углом 90°, расположены две обмотки, одна из которых (обмотка возбуждения) питается переменным синусоидальным током постоянной частоты и постоянной амплитуды, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр переменного напряжения, отградуированный, например, в об/мин), либо вход автоматической системы управления.
Принцип действия основан на увлечении магнитного потока, наведенного в роторе короткозамкнутым ротором при его вращении. При неподвижном роторе, так как магнитные поля обмотки возбуждения и выходной обмотки взаимно перпендикулярны, выходное напряжение равно нулю. При вращении ротора эта перпендикулярность нарушается и в выходной обмотке наводится ЭДС, пропорциональная скорости вращения.
Так как частота выходного напряжения не зависит от частоты вращения ротора и равна частоте напряжения в обмотке возбуждения, такой тип тахогенератора и называется асинхронным.
Асинхронный тахогенератор также позволяет определять направление вращения ротора, при смене направления фаза выходного сигнала изменяется на 180°.
Синхронные тахогенераторы переменного тока
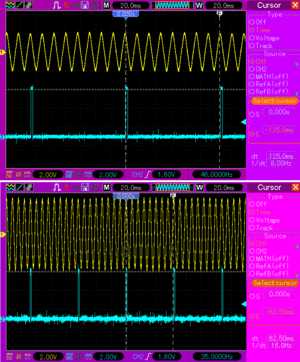 Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора.
Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора. Жёлтый — выход 16-полюсного тахогенератора.
Синий — датчик положения ротора (1 импульс на 1 оборот).
частоты вращения:
сверху 8 Гц, снизу 16 Гц
Представляют собой бесколлекторные синхронные машины с ротором, подмагниченным постоянным магнитом. На статоре расположены одна или несколько обмоток.
Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого прямо пропорциональны скорости вращения ротора.
Недостаток синхронного тахогенератора — невозможность определения направления вращения, что в некоторых применениях нежелательно.
Часто ротор выполняют в виде многополюсного постоянного магнита, поэтому на 1 оборот ротора генерируется несколько периодов выходного сигнала.
Измерения скорости вращения допустимо двумя способами — частотным и амплитудным.
Синхронные и асинхронные тахогенераторы обладает бо́льшим сроком службы по сравнению с тахогенераторами постоянного напряжения, так как в них отсутствуют коллекторно-щёточный узел.
Частотный способ определения скорости вращения
Так как частота выходного сигнала не зависит от температуры, уменьшения магнитного потока вызванного старением и величины зазора между ротором и статором тахогенератора, то этот способ является одним из самых точных.
Скорость вращения вычисляется путём определения частоты выходного сигнала и дальнейшим вычислением частоты вращения ротора по формуле:
- Frot=Foutp,{\displaystyle F_{rot}={\frac {F_{out}}{p}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора в Гц,
- p{\displaystyle p} — число пар полюсов ротора тахогенератора.
Недостатком частотного метода является то, что для более точного определения скорости необходимо больше времени, и за это время скорость может значительно измениться. Из этого следует, что чем больше времени тратится на накопление импульсов для определения частоты, тем больше динамическая погрешность в измерениях, поэтому в следящих системах автоматического регулирования скорости вращения происходит запаздывание реакции на возмущение и это в некоторых применениях нежелательно.
Для снижения динамической погрешности используют тахогенераторы с бо́льшим числом полюсов, это позволяет сократить время определения выходной частоты, а значит и время реакции управляющей системы авторегулирования.
Определить частоту сигнала можно из накопленных и усредненных периодов нескольких импульсов. Расчет производится по формуле:
- Fout=NT1+...+TN=N∑i=1NTi,{\displaystyle F_{out}={\frac {N}{T_{1}+...+T_{N}}}={\frac {N}{\sum _{i=1}^{N}T_{i}}},}
- где Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора,
- N{\displaystyle N} — число накопленных импульсов,
- T{\displaystyle T} — длительность периода.
При таком способе определения скорости вращения надо учитывать, что амплитуда выходного сигнала тоже меняется, а значит вход частотного детектора должен быть спроектирован для приема входного сигнала с изменяющейся в широких пределах амплитудой, что иногда является недостатком из-за усложнения схемы.
Амплитудный способ определения скорости вращения
Результат работы простой схемы выпрямления и фильтрации переменного напряжения: кремниевый диодный мост и RC цепь.Желтый — сигнал после диодного моста.
Синий — сигнал после RC цепи.
Видно резкое ускорение и плавное торможение.
Такой способ определения частоты не очень точен из-за зависимости от температуры, зазора между ротором и статором, от изменений магнитного потока магнита ротора при старении, а также из-за влияния частотной интермодуляции на реактивные элементы цепи. Но, в ряде случаев, данный способ оправдывает себя, компенсируя недостатки простотой схемы управления.
По мере увеличения скорости вращения, ЭДС, генерируемая в обмотке статора СТГ, будет возрастать. Для снятия показаний с тахогенератора и приведения их к удобной форме используется одно- или двухполупериодный выпрямитель и НЧ фильтр, сглаживающий пульсации.
Отношение напряжения к частоте вращения ротора описывает параметр крутизна выходного напряжения, или коэффициент преобразования, представляемый обычно в mV⋅RPM{\displaystyle mV\cdot RPM} (милливольт на оборот в минуту). По этому параметру можно определить частоту вращения ротора по формуле:
- Frot=Uout60St,{\displaystyle F_{rot}={\frac {U_{out}}{60S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Uout{\displaystyle U_{out}} — выходное действующее напряжение с тахогенератора,
- St{\displaystyle S_{t}} — крутизна выходного напряжения в mV⋅RPM{\displaystyle mV\cdot RPM}.
Достоинства и недостатки
Достоинства:
- Пара тахогенератор — тахометр не требует дополнительных источников питания, просто и достаточно надёжно в работе.
Недостатки:
- Тахогенераторы не могут измерять очень медленное вращение — амплитуда генерируемого сигнал становится очень малой.
- Тахогенераторы создают дополнительную крутящий момент трения на вращающийся вал, что вносит некоторую ошибку в измерения, но обычно она несущественна.
- Содержат трущиеся детали, и поэтому требуют периодическое техническое обслуживание.
Иные датчики скорости вращения
С развитием электроники тахогенераторы все чаще заменяются на импульсные датчики, например, схемы с оптронами открытого типа, формирующие импульсы при отражении пучка света от контрастных меток на валу или на прерывания луча света обтюратором — крыльчаткой связанной с валом — датчики угла поворота (энкодеры), либо импульсные индукционные датчики, датчики Холла и прочие подобные импульсные электронные датчики.
См. также
Литература
- Арменский Е. В., Фалк Г. Б. Электрические микромашины: Учебное пособие для студ. электротехнических специальностей вузов. — 3-е, перераб и доп.. — М.: Высшая школа, 1985. — 231 с. — 22 000 экз.
- Чечет Ю. С. Электрические микромашины автоматических устройств. — 1964.
Ссылки
Тахогенератор — Википедия. Что такое Тахогенератор
Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель Тахогенера́тор (от др.-греч. τάχος — «быстрый», «скорость» и лат. generator «производитель») — электрическая микромашина, измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в однозначно связанный со скоростью электрический сигнал.
Обычно величина (ЭДС), а в некоторых типах тахогенераторов и частота сигнала прямо пропорциональны частоте вращения ротора.
Электрический сигнал тахогенератора подаётся либо для непосредственного отображения и считывания показаний на проградуированный в единицах скорости вращения вторичный прибор — индикатор тахометра, либо на вход автоматических устройств управления, регулирующих частоту вращения.
Принцип действия
По принципу действия тахогенераторы делятся на несколько типов — с выходным сигналом переменного тока или напряжения (синхронные и асинхронные) и с выходным сигналом постоянного тока.
Тахогенераторы постоянного тока
Сравнение синхронного тахогенератора постоянного тока с синхронным тахогенератором переменного тока.Желтый — постоянного тока
Синий — переменного тока
Небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
Эти тахогенераторы представляют собой обычные коллекторные генераторы постоянного тока, но с постоянным возбуждением, как правило осуществляемого постоянными магнитами статора. Так как ЭДС, наводимая в обмотках ротора, прямо пропорциональна скорости изменения магнитного потока в обмотках в соответствии с законом Фарадея, то и напряжение, снимаемое со щёток коллектора оказывается прямо пропорциональным скорости вращения ротора.
Из-за наличия щёточно-коллекторного узла ресурс и надёжность данного типа тахогенераторов меньше, чем например у тахогенераторов переменного тока, а из-за процесса коммутации пластин коллектора и щёток при вращении порождаются дополнительные электрические импульсные помехи выходного сигнала тахогенератора.
Информационным сигналом тахогенератора постоянного тока является электрическое напряжение, что вызывает дополнительные ошибки преобразования скорости, обусловленные, в основном, зависимостью магнитного потока подмагничивания от температуры, переходного электрического сопротивления между щётками и коллектором, изменения магнитного потока подмагничивания постоянного магнита статора со временем из-за саморазмагничивания и изменения зазора между ротором и статором.
Достоинствами тахогенераторов постоянного тока являются удобная форма представления выходного сигнала и возможность определять не только скорость вращения ротора, но и направление его вращения (при смене направления вращения выходной сигнал меняет полярность).
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэ
Тахогенератор — Википедия
Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель Тахогенера́тор (от др.-греч. τάχος — «быстрый», «скорость» и лат. generator «производитель») — электрическая микромашина, измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в однозначно связанный со скоростью электрический сигнал.
Обычно величина (ЭДС), а в некоторых типах тахогенераторов и частота сигнала прямо пропорциональны частоте вращения ротора.
Электрический сигнал тахогенератора подаётся либо для непосредственного отображения и считывания показаний на проградуированный в единицах скорости вращения вторичный прибор — индикатор тахометра, либо на вход автоматических устройств управления, регулирующих частоту вращения.
Принцип действия
По принципу действия тахогенераторы делятся на несколько типов — с выходным сигналом переменного тока или напряжения (синхронные и асинхронные) и с выходным сигналом постоянного тока.
Тахогенераторы постоянного тока
Сравнение синхронного тахогенератора постоянного тока с синхронным тахогенератором переменного тока.Желтый — постоянного тока
Синий — переменного тока
Небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
Эти тахогенераторы представляют собой обычные коллекторные генераторы постоянного тока, но с постоянным возбуждением, как правило осуществляемого постоянными магнитами статора. Так как ЭДС, наводимая в обмотках ротора прямо пропорциональна скорости изменения магнитного потока в обмотках в соответствии с законом Фарадея, то и напряжение, снимаемое со щёток коллектора оказывается прямо пропорциональным скорости вращения ротора.
Из-за наличия щёточно-коллекторного узла ресурс и надёжность данного типа тахогенераторов меньше, чем например у тахогенераторов переменного тока, а из-за процесса коммутации пластин коллектора и щёток при вращении порождаются дополнительные электрические импульсные помехи выходного сигнала тахогенератора.
Информационным сигналом тахогенератора постоянного тока является электрическое напряжение, что вызывает дополнительные ошибки преобразования скорости, обусловленные, в основном, зависимостью магнитного потока подмагничивания от температуры, переходного электрического сопротивления между щётками и коллектором, изменения магнитного потока подмагничивания постоянного магнита статора со временем из-за саморазмагничивания и изменения зазора между ротором и статором.
Достоинствами тахогенераторов постоянного тока - удобная форма представления выходного сигнала и возможность определять не только скорость вращения ротора, но и направление его вращения (при смене направления вращения выходной сигнал изменяет полярность).
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэффициентом преобразования» или «крутизной тахогенератора» и обычно указывается в технической спецификации тахогенератора в милливольтах на оборот в минуту. По этому параметру и выходному напряжению можно определить частоту вращения ротора по формуле:
- Frot=UoutSt,{\displaystyle F_{rot}={\frac {U_{out}}{S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в оборотах в минуту,
- Uout{\displaystyle U_{out}} — выходное напряжение тахогенератора,
- St{\displaystyle S_{t}} — коэффициент преобразования.
Асинхронные тахогенераторы переменного тока
По конструкции подобны асинхронным электродвигателям с короткозамкнутым ротором. Короткозамкнутый ротор обычно выполнен в виде полого алюминиевого или медного цилиндра. На статоре такого тахогенератора с магнитными потоками, ориентированными относительно друг друга под углом 90°, расположены две обмотки, одна из которых (обмотка возбуждения) питается переменным синусоидальным током постоянной частоты и постоянной амплитуды, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр переменного напряжения, отградуированный, например, в об/мин), либо вход автоматической системы управления.
Принцип действия основан на увлечении магнитного потока, наведенного в роторе короткозамкнутым ротором при его вращении. При неподвижном роторе, так как магнитные поля обмотки возбуждения и выходной обмотки взаимно перпендикулярны, выходное напряжение равно нулю. При вращении ротора эта перпендикулярность нарушается и в выходной обмотке наводится ЭДС, пропорциональная скорости вращения.
Так как частота выходного напряжения не зависит от частоты вращения ротора и равна частоте напряжения в обмотке возбуждения, такой тип тахогенератора и называется асинхронным.
Асинхронный тахогенератор также позволяет определять направление вращения ротора, при смене направления фаза выходного сигнала изменяется на 180°.
Синхронные тахогенераторы переменного тока
Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора. Жёлтый — выход 16-полюсного тахогенератора.
Синий — датчик положения ротора (1 импульс на 1 оборот).
частоты вращения:
сверху 8 Гц, снизу 16 Гц
Представляют собой бесколлекторные синхронные машины с ротором, подмагниченным постоянным магнитом. На статоре расположены одна или несколько обмоток.
Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого прямо пропорциональны скорости вращения ротора.
Недостаток синхронного тахогенератора — невозможность определения направления вращения, что в некоторых применениях нежелательно.
Часто ротор выполняют в виде многополюсного постоянного магнита, поэтому на 1 оборот ротора генерируется несколько периодов выходного сигнала.
Измерения скорости вращения допустимо двумя способами — частотным и амплитудным.
Синхронные и асинхронные тахогенераторы обладает бо́льшим сроком службы по сравнению с тахогенераторами постоянного напряжения, так как в них отсутствуют коллекторно-щёточный узел.
Частотный способ определения скорости вращения
Так как частота выходного сигнала не зависит от температуры, уменьшения магнитного потока вызванного старением и величины зазора между ротором и статором тахогенератора, то этот способ является одним из самых точных.
Скорость вращения вычисляется путём определения частоты выходного сигнала и дальнейшим вычислением частоты вращения ротора по формуле:
- Frot=Foutp,{\displaystyle F_{rot}={\frac {F_{out}}{p}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора в Гц,
- p{\displaystyle p} — число пар полюсов ротора тахогенератора.
Недостатком частотного метода является то, что для более точного определения скорости необходимо больше времени, и за это время скорость может значительно измениться. Из этого следует, что чем больше времени тратится на накопление импульсов для определения частоты, тем больше динамическая погрешность в измерениях, поэтому в следящих системах автоматического регулирования скорости вращения происходит запаздывание реакции на возмущение и это в некоторых применениях нежелательно.
Для снижения динамической погрешности используют тахогенераторы с бо́льшим числом полюсов, это позволяет сократить время определения выходной частоты, а значит и время реакции управляющей системы авторегулирования.
Определить частоту сигнала можно из накопленных и усредненных периодов нескольких импульсов. Расчет производится по формуле:
- Fout=NT1+...+TN=N∑i=1NTi,{\displaystyle F_{out}={\frac {N}{T_{1}+...+T_{N}}}={\frac {N}{\sum _{i=1}^{N}T_{i}}},}
- где Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора,
- N{\displaystyle N} — число накопленных импульсов,
- T{\displaystyle T} — длительность периода.
При таком способе определения скорости вращения надо учитывать, что амплитуда выходного сигнала тоже меняется, а значит вход частотного детектора должен быть спроектирован для приема входного сигнала с изменяющейся в широких пределах амплитудой, что иногда является недостатком из-за усложнения схемы.
Амплитудный способ определения скорости вращения
Результат работы простой схемы выпрямления и фильтрации переменного напряжения: кремниевый диодный мост и RC цепь.Желтый — сигнал после диодного моста.
Синий — сигнал после RC цепи.
Видно резкое ускорение и плавное торможение.
Такой способ определения частоты не очень точен из-за зависимости от температуры, зазора между ротором и статором, от изменений магнитного потока магнита ротора при старении, а также из-за влияния частотной интермодуляции на реактивные элементы цепи. Но, в ряде случаев, данный способ оправдывает себя, компенсируя недостатки простотой схемы управления.
По мере увеличения скорости вращения, ЭДС, генерируемая в обмотке статора СТГ, будет возрастать. Для снятия показаний с тахогенератора и приведения их к удобной форме используется одно- или двухполупериодный выпрямитель и НЧ фильтр, сглаживающий пульсации.
Отношение напряжения к частоте вращения ротора описывает параметр крутизна выходного напряжения, или коэффициент преобразования, представляемый обычно в mV⋅RPM{\displaystyle mV\cdot RPM} (милливольт на оборот в минуту). По этому параметру можно определить частоту вращения ротора по формуле:
- Frot=Uout60St,{\displaystyle F_{rot}={\frac {U_{out}}{60S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Uout{\displaystyle U_{out}} — выходное действующее напряжение с тахогенератора,
- St{\displaystyle S_{t}} — крутизна выходного напряжения в mV⋅RPM{\displaystyle mV\cdot RPM}.
Достоинства и недостатки
Достоинства:
- Пара тахогенератор — тахометр не требует дополнительных источников питания, просто и достаточно надёжно в работе.
Недостатки:
- Тахогенераторы не могут измерять очень медленное вращение — амплитуда генерируемого сигнал становится очень малой.
- Тахогенераторы создают дополнительную крутящий момент трения на вращающийся вал, что вносит некоторую ошибку в измерения, но обычно она несущественна.
- Содержат трущиеся детали, и поэтому требуют периодическое техническое обслуживание.
Иные датчики скорости вращения
С развитием электроники тахогенераторы все чаще заменяются на импульсные датчики, например, схемы с оптронами открытого типа, формирующие импульсы при отражении пучка света от контрастных меток на валу или на прерывания луча света обтюратором — крыльчаткой связанной с валом — датчики угла поворота (энкодеры), либо импульсные индукционные датчики, датчики Холла и прочие подобные импульсные электронные датчики.
См. также
Литература
- Арменский Е. В., Фалк Г. Б. Электрические микромашины: Учебное пособие для студ. электротехнических специальностей вузов. — 3-е, перераб и доп.. — М.: Высшая школа, 1985. — 231 с. — 22 000 экз.
- Чечет Ю. С. Электрические микромашины автоматических устройств. — 1964.
Ссылки
Тахогенератор — Википедия. Что такое Тахогенератор
Тахогенератор (чёрный), соединённый с электродвигателем (красный) 16-полюсный синхронный тахогенератор переменного тока, встроенный в коллекторный электродвигатель Тахогенера́тор (от др.-греч. τάχος — «быстрый», «скорость» и лат. generator «производитель») — электрическая микромашина, измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в однозначно связанный со скоростью электрический сигнал.
Обычно величина (ЭДС), а в некоторых типах тахогенераторов и частота сигнала прямо пропорциональны частоте вращения ротора.
Электрический сигнал тахогенератора подаётся либо для непосредственного отображения и считывания показаний на проградуированный в единицах скорости вращения вторичный прибор — индикатор тахометра, либо на вход автоматических устройств управления, регулирующих частоту вращения.
Принцип действия
По принципу действия тахогенераторы делятся на несколько типов — с выходным сигналом переменного тока или напряжения (синхронные и асинхронные) и с выходным сигналом постоянного тока.
Тахогенераторы постоянного тока
Сравнение синхронного тахогенератора постоянного тока с синхронным тахогенератором переменного тока.Желтый — постоянного тока
Синий — переменного тока
Небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
Эти тахогенераторы представляют собой обычные коллекторные генераторы постоянного тока, но с постоянным возбуждением, как правило осуществляемого постоянными магнитами статора. Так как ЭДС, наводимая в обмотках ротора прямо пропорциональна скорости изменения магнитного потока в обмотках в соответствии с законом Фарадея, то и напряжение, снимаемое со щёток коллектора оказывается прямо пропорциональным скорости вращения ротора.
Из-за наличия щёточно-коллекторного узла ресурс и надёжность данного типа тахогенераторов меньше, чем например у тахогенераторов переменного тока, а из-за процесса коммутации пластин коллектора и щёток при вращении порождаются дополнительные электрические импульсные помехи выходного сигнала тахогенератора.
Информационным сигналом тахогенератора постоянного тока является электрическое напряжение, что вызывает дополнительные ошибки преобразования скорости, обусловленные, в основном, зависимостью магнитного потока подмагничивания от температуры, переходного электрического сопротивления между щётками и коллектором, изменения магнитного потока подмагничивания постоянного магнита статора со временем из-за саморазмагничивания и изменения зазора между ротором и статором.
Достоинствами тахогенераторов постоянного тока - удобная форма представления выходного сигнала и возможность определять не только скорость вращения ротора, но и направление его вращения (при смене направления вращения выходной сигнал изменяет полярность).
Отношение выходного напряжения к частоте вращения ротора называют «чувствительностью тахогенератора» или «коэффициентом преобразования» или «крутизной тахогенератора» и обычно указывается в технической спецификации тахогенератора в милливольтах на оборот в минуту. По этому параметру и выходному напряжению можно определить частоту вращения ротора по формуле:
- Frot=UoutSt,{\displaystyle F_{rot}={\frac {U_{out}}{S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в оборотах в минуту,
- Uout{\displaystyle U_{out}} — выходное напряжение тахогенератора,
- St{\displaystyle S_{t}} — коэффициент преобразования.
Асинхронные тахогенераторы переменного тока
По конструкции подобны асинхронным электродвигателям с короткозамкнутым ротором. Короткозамкнутый ротор обычно выполнен в виде полого алюминиевого или медного цилиндра. На статоре такого тахогенератора с магнитными потоками, ориентированными относительно друг друга под углом 90°, расположены две обмотки, одна из которых (обмотка возбуждения) питается переменным синусоидальным током постоянной частоты и постоянной амплитуды, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр переменного напряжения, отградуированный, например, в об/мин), либо вход автоматической системы управления.
Принцип действия основан на увлечении магнитного потока, наведенного в роторе короткозамкнутым ротором при его вращении. При неподвижном роторе, так как магнитные поля обмотки возбуждения и выходной обмотки взаимно перпендикулярны, выходное напряжение равно нулю. При вращении ротора эта перпендикулярность нарушается и в выходной обмотке наводится ЭДС, пропорциональная скорости вращения.
Так как частота выходного напряжения не зависит от частоты вращения ротора и равна частоте напряжения в обмотке возбуждения, такой тип тахогенератора и называется асинхронным.
Асинхронный тахогенератор также позволяет определять направление вращения ротора, при смене направления фаза выходного сигнала изменяется на 180°.
Синхронные тахогенераторы переменного тока
Осциллограмма, показывающая зависимость частоты и напряжения выходного сигнала синхронного тахогенератора от частоты вращения ротора. Жёлтый — выход 16-полюсного тахогенератора.
Синий — датчик положения ротора (1 импульс на 1 оборот).
частоты вращения:
сверху 8 Гц, снизу 16 Гц
Представляют собой бесколлекторные синхронные машины с ротором, подмагниченным постоянным магнитом. На статоре расположены одна или несколько обмоток.
Такой тахогенератор преобразует скорость вращения ротора в переменное напряжение, амплитуда и частота которого прямо пропорциональны скорости вращения ротора.
Недостаток синхронного тахогенератора — невозможность определения направления вращения, что в некоторых применениях нежелательно.
Часто ротор выполняют в виде многополюсного постоянного магнита, поэтому на 1 оборот ротора генерируется несколько периодов выходного сигнала.
Измерения скорости вращения допустимо двумя способами — частотным и амплитудным.
Синхронные и асинхронные тахогенераторы обладает бо́льшим сроком службы по сравнению с тахогенераторами постоянного напряжения, так как в них отсутствуют коллекторно-щёточный узел.
Частотный способ определения скорости вращения
Так как частота выходного сигнала не зависит от температуры, уменьшения магнитного потока вызванного старением и величины зазора между ротором и статором тахогенератора, то этот способ является одним из самых точных.
Скорость вращения вычисляется путём определения частоты выходного сигнала и дальнейшим вычислением частоты вращения ротора по формуле:
- Frot=Foutp,{\displaystyle F_{rot}={\frac {F_{out}}{p}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора в Гц,
- p{\displaystyle p} — число пар полюсов ротора тахогенератора.
Недостатком частотного метода является то, что для более точного определения скорости необходимо больше времени, и за это время скорость может значительно измениться. Из этого следует, что чем больше времени тратится на накопление импульсов для определения частоты, тем больше динамическая погрешность в измерениях, поэтому в следящих системах автоматического регулирования скорости вращения происходит запаздывание реакции на возмущение и это в некоторых применениях нежелательно.
Для снижения динамической погрешности используют тахогенераторы с бо́льшим числом полюсов, это позволяет сократить время определения выходной частоты, а значит и время реакции управляющей системы авторегулирования.
Определить частоту сигнала можно из накопленных и усредненных периодов нескольких импульсов. Расчет производится по формуле:
- Fout=NT1+...+TN=N∑i=1NTi,{\displaystyle F_{out}={\frac {N}{T_{1}+...+T_{N}}}={\frac {N}{\sum _{i=1}^{N}T_{i}}},}
- где Fout{\displaystyle F_{out}} — частота сигнала на выходе тахогенератора,
- N{\displaystyle N} — число накопленных импульсов,
- T{\displaystyle T} — длительность периода.
При таком способе определения скорости вращения надо учитывать, что амплитуда выходного сигнала тоже меняется, а значит вход частотного детектора должен быть спроектирован для приема входного сигнала с изменяющейся в широких пределах амплитудой, что иногда является недостатком из-за усложнения схемы.
Амплитудный способ определения скорости вращения
Результат работы простой схемы выпрямления и фильтрации переменного напряжения: кремниевый диодный мост и RC цепь.Желтый — сигнал после диодного моста.
Синий — сигнал после RC цепи.
Видно резкое ускорение и плавное торможение.
Такой способ определения частоты не очень точен из-за зависимости от температуры, зазора между ротором и статором, от изменений магнитного потока магнита ротора при старении, а также из-за влияния частотной интермодуляции на реактивные элементы цепи. Но, в ряде случаев, данный способ оправдывает себя, компенсируя недостатки простотой схемы управления.
По мере увеличения скорости вращения, ЭДС, генерируемая в обмотке статора СТГ, будет возрастать. Для снятия показаний с тахогенератора и приведения их к удобной форме используется одно- или двухполупериодный выпрямитель и НЧ фильтр, сглаживающий пульсации.
Отношение напряжения к частоте вращения ротора описывает параметр крутизна выходного напряжения, или коэффициент преобразования, представляемый обычно в mV⋅RPM{\displaystyle mV\cdot RPM} (милливольт на оборот в минуту). По этому параметру можно определить частоту вращения ротора по формуле:
- Frot=Uout60St,{\displaystyle F_{rot}={\frac {U_{out}}{60S_{t}}},}
- где Frot{\displaystyle F_{rot}} — частота вращения ротора в Гц,
- Uout{\displaystyle U_{out}} — выходное действующее напряжение с тахогенератора,
- St{\displaystyle S_{t}} — крутизна выходного напряжения в mV⋅RPM{\displaystyle mV\cdot RPM}.
Достоинства и недостатки
Достоинства:
- Пара тахогенератор — тахометр не требует дополнительных источников питания, просто и достаточно надёжно в работе.
Недостатки:
- Тахогенераторы не могут измерять очень медленное вращение — амплитуда генерируемого сигнал становится очень малой.
- Тахогенераторы создают дополнительную крутящий момент трения на вращающийся вал, что вносит некоторую ошибку в измерения, но обычно она несущественна.
- Содержат трущиеся детали, и поэтому требуют периодическое техническое обслуживание.
Иные датчики скорости вращения
С развитием электроники тахогенераторы все чаще заменяются на импульсные датчики, например, схемы с оптронами открытого типа, формирующие импульсы при отражении пучка света от контрастных меток на валу или на прерывания луча света обтюратором — крыльчаткой связанной с валом — датчики угла поворота (энкодеры), либо импульсные индукционные датчики, датчики Холла и прочие подобные импульсные электронные датчики.
См. также
Литература
- Арменский Е. В., Фалк Г. Б. Электрические микромашины: Учебное пособие для студ. электротехнических специальностей вузов. — 3-е, перераб и доп.. — М.: Высшая школа, 1985. — 231 с. — 22 000 экз.
- Чечет Ю. С. Электрические микромашины автоматических устройств. — 1964.
Ссылки
Тахогенератор
Тахогенератор. Общие сведения о тахогенераторах. Электрические машины малой мощности, работающие в режиме генератора, выходное напряжение которых Uг является практически линейной функцией частоты вращения вала n, называются тахогенераторами. Такие машины используются в автоматических системах управления и регулирования для измерения частоты вращения, для дифференцирования, для обратной связи по скорости и других операций. В качестве тахогенераторов применяются генераторы постоянного и переменного токов, в том числе синхронные и асинхронные генераторы. Обычно мощность таких машин менее 50 кВт.
Основными требованиями, предъявляемыми к тахогенераторам, являются: линейность характеристики Uг(n), большая её крутизна, определяемая как k = Uг/n, малая потребляемая мощность и минимальные погрешности.
Тахогенераторы постоянного тока. Тахогенераторы постоянного тока (ТГПТ) представляют собой генераторы с независимым возбуждением (рис. 5.1, а) или с возбуждением от постоянных магнитов (рис. 5.1, б). ЭДС якоря определяется формулой Е=сЕФn. При постоянном потоке Ф Е = k n. При холостом ходе Е=Uг, т.е. Uг= k n. Между Uг и n линейная зависимость (прямая 1 на рис. 5.2). При нагрузке на магнитный поток Ф влияет реакция якоря и поэтому выходная характеристика несколько отличается от линейной (кривая 2 на рис. 5.2). Для сохранения линейности магнитная цепь машины должна быть ненасыщенной. Для ТГПТ допустимая погрешность составляет 0,5 – 3%. При нагрузке имеет место падение напряжения в обмотке якоря RяIя, между коллектором и щётками Uщ. В этом случае Uг= Е – Uщ – RяIя, так как при малых скоростях Е< Uщ и Uг=0, на выходной характеристике появляется зона нечувствительности ЗН (рис. 5.2, кривая 3). Для уменьшения зоны нечувствительности надо уменьшить Uщ, т.е. сопротивление щёток сделать как можно меньше, а нагрузки – больше.
Кроме отмеченного недостатка, в ТГПТ имеет место пульсация выходного напряжения, которая вызвана работой коллектора: неточностью его изготовления, неравномерностью воздушного зазора, зубчатым строением якоря, неровностями коллектора и др. Преимущество ТГПТ заключается в том, что он удовлетворяет основным требованиям, предъявляемым к тахогенераторам.
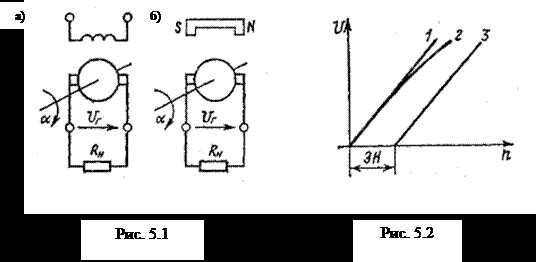
Синхронные тахогенераторы. Синхронные тахогенераторы (СТГ) работают как обычные синхронные генераторы, возбуждаемые постоянными магнитами, расположенными на роторе. Их ЭДС и частота f = pn/60 пропорциональны частоте вращения ротора. Поэтому с изменением частоты вращения ротора изменяется не только напряжение на выходе Uг, но и частота этого напряжения. Кроме того, из-за влияния реакции якоря зависимость Uг (n) нелинейна.
Из-за указанных особенностей применять их в схемах нецелесообразно. В основном их применят для измерения частоты вращения рабочих механизмов. Основным достоинством СТГ является сравнительно большая мощность на выходе.
Асинхронные тахогенераторы. Асинхронные тахогенераторы (АТГ) имеют конструкцию, аналогичную конструкции двухфазного асинхронного двигателя с полым ротором. Принцип действия АТГ поясняется схемой рис.5.3. На статоре расположены две обмотки: возбуждения и генераторная. Обмотка возбуждения питается переменным напряжением Uв частотой f. С генераторной обмотки снимается напряжение, пропорциональное частоте вращения ротора. Генераторная обмотка сдвинута в пространстве на 90° относительно обмотки возбуждения.
Если бы поток Фв был постоянным, то при вращении ротора в нём, как в якоре машины постоянного тока, наводилась бы ЭДС вращения Ея=спФв, протекал бы постоянный ток Iя, который создал бы постоянное поперечное поле Фг реакции якоря, пропорциональное частоте вращения п. Так как поток изменяется по синусоиде, то и все величины: ЭДС , ток , поток – переменные. В результате поток наводит в генераторной обмотке синусоидальную ЭДС ег. Её действующее значение
где wг – число витков генераторной обмотки; f – частота напряжения, питающего обмотку возбуждения; Фmг – амплитуда магнитного потока, пронизывающего генераторную обмотку.
Амплитуда потока Фmг, как это следует из принципа работы АТГ, пропорциональна частоте вращения ротора тахогенератора и амплитуде потока обмотки возбуждения, которая постоянна. Так как амплитуда потока возбуждения Фmв=const, то Еmя = спФmв, Imя, Фmг,Еmг и Umг пропорциональны частоте вращения ротора п.
Кроме ЭДС вращения, в роторе наводится трансформаторная ЭДС. Действительно, при п = 0 переменный поток возбуждения наводит в полом роторе, как и во вторичной обмотке трансформатора, ЭДС ет, называемую трансформаторной. ЭДС ет создаёт в полом роторе ток ротора и магнитный поток Фт, направленный, как и у вторичной обмотки трансформатора, против потока возбуждения. На генераторную обмотку трансформаторная ЭДС никакого влияния не оказывает, так как последняя расположена перпендикулярно магнитному потоку возбуждения. При вращении ротора все явления, связанные с трансформаторной ЭДС, не изменятся и на выходное напряжение Uг она никакого влияния оказывать не будет.
Недостатком АТГ является некоторая нелинейность выходной характеристики (рис. 5.4), вызываемая амплитудной погрешностью, которая объясняется тем, что переменный поток наводит в роторе дополнительную ЭДС ед. Так как поток пропорционален п, то ЭДС ед пропорциональна п2 и, следовательно, ток iд и поток Фд нелинейно изменяют Фв; кроме того, имеют место фазовая погрешность и погрешность от остаточной ЭДС.
Тахогенератор — Знаешь как
На рис, 12-1 был показан исполнительный двигатель, приводящий во вращение генератор. Входным сигналом у генератора была скорость со, а выходным — напряжение на зажимах U. Если между входным и выходным сигналами U = f (ω) сохраняется практически линейная зависимость, то такой генератор называется тахогенератором. На рис. 12-17 эта зависимость, показанная прямой линией 1, называется идеальной выходной характеристикой тахогеператора.
Основное назначение тахогенератора измерять скорость вращения вала исполнительного двигателя. В системах автоматического регулирования скорости тахогенератор играет роль измерительного элемента, указывающего отклонение скорости от заданной величины и выдающего сигнал, который, будучи преобразован и передан, приводит к восстановлению скорости.
Рис. 12-17. Выходные характеристики тахогенератора.
Кроме того, тахогенераторы широко применяются для разного рода механических вычислительных операций. Тахогенератором постоянного тока обычно служит генератор с независимым возбуждением. В некоторых случаях применяется тахогенератор с возбуждением постоянными магнитами.
Если тахогенератор работает с разомкнутыми зажимами, то Е = cEФn= сФω, при постоянном магнитном потоке Ф будет меняться, в зависимости от угловой скорости ω, по закону прямой линии. Если же на зажимы тахогенератора включено сопротивление и в обмотке якоря протекает ток Iя, то вследствие реакции якоря и падения напряжения в проводах и щетках якоря напряжение U будет тем меньше E, чем меньше сопротивление, включенное на зажимы. В этом случае U = f (n), показанные кривыми 2 и 5 на рис. 12-17, будут отклоняться от прямой 1. Поэтому сопротивление нагрузки тахогенератора всегда должно оставаться неизменным и во много раз превышающим сопротивление обмотки якоря.
ТАХОГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА С ПОЛЫМ НЕМАГНИТНЫМ РОТОРОМ
Асинхронный тахогенератор переменного тока применяется в маломощном следящем приводе, в системах автоматического управления и в вычислительных устройствах, работающих на переменном токе.
Конструктивно асинхронный тахогенератор, как правило, имеет ротор в виде полого немагнитного стакана и статор, состоящий из внешней и внутренней частей подобно исполнительному двигателю переменного тока (рис. 12-6). Внутренний статор не имеет обмотки, а на внешнем расположены две обмотки, сдвинутые в пространстве под углом 90°. Одна из обмоток — обмотка возбуждения 1 (рис. 12-18), к которой приложено напряжение UB постоянной амплитуды и постоянной частоты, расположена на рис. 12-18 так, что ось ее вертикальна. Другая обмотка — генераторная 2, ось которой расположена горизонтально. Толщина стенок полого ротора 3 показана преувеличенной.
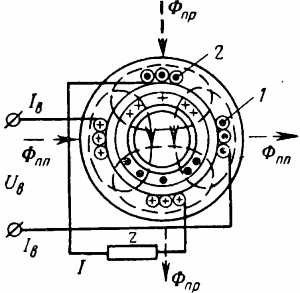
Переменный ток Iв, протекая по обмотке статора 1, создает пульсирующие н. с. Fcт и поток Фст, который
наводит в теле неподвижного ротора, как во вторичной обмотке трансформатора, э. д. с. и вихревые токи. Направление их встречно направлению тока в обмотке возбуждения, но они на рис. 12-18 не показаны. Этими токами создается н. с. ротора Fpoт, совместно с которой н. с. статора Fcт создает продольный поток Фпр, совпадающий с осью обмотки возбуждения.
Если ротор приведен во вращение, то в его теле создается э. д. с. вращения Евр, а значит, и ток, направление которых на рис. 12-18 определено правилом правой руки и показано на роторе. Током ротора создается поперечный поток Фп. п, ось которого совпадает с осью обмотки статора 2.
Рис 12-18. Тахогенератор переменного тока.
Таким образом, создается своеобразный трансформатор, первичной обмоткой которого является ротор, а вторичной — обмотка 2. Поперечным потоком в обмотке 2 создается трансформаторная э. д. с, частота которой равна частоте тока в роторе и, значит, потока Фпр. В свою очередь частота потока Фпр равна частоте тока возбуждения Iв обмотки статора 1, которая постоянна. Таким образом, частота э. д. с, наведенной в обмотке статора 2, постоянна, а ее амплитуда пропорциональна скорости вращения ротора, так как этой скорости пропорциональны амплитудные значения тока ротора и потока Фп.п.
Так же как и для тахогенератора постоянного тока, сопротивление нагрузки z должно быть во много раз больше сопротивления обмотки статора 2.
Статья на тему Тахогенератор