Мехатрон что это такое
Мехатроник (продолжение) — Volkswagen Golf, 1.6 л., 2011 года на DRIVE2
Содержание:
1. Вступление и краткое устройство КПП
2. Эволюция, проблемы, ремонт и запчасти DSG7 DQ200:
2.1. Сцепление
2.2.1. Мехатроник (начало)
2.2.2. Мехатроник (продолжение)
2.3.1. Механическая часть КПП (начало)
2.3.2. Механическая часть КПП (продолжение)
3. Прошивка
3.1. Определение, подбор и актуальные версии прошивок 0AM (для DQ250 02E тоже полезно)
3.2. Нюансы подбора прошивки 0AM, как выбрать правильный файл (для DQ250 02E тоже полезно)
Вне зачёта: Таблица прошивок DSG7 0AM DQ200 (а также DQ250 02E и немного 0CW)
4. Компьютерная диагностика и адаптация:
4.0. "Паспорт" КПП
4.1. Электронная часть КПП (мехатроник)
4.2. Механическая часть КПП (сцепления)
4.3. Адаптационная карта сцеплений
4.4.1. Адаптация и базовая регулировка КПП (60 канал)
4.4.2. Адаптационная поездка, прочие базовые установки
4.5.1. Другие измеряемые группы (начало)
4.5.2. Другие измеряемые группы (продолжение)
5. Советы по эксплуатации DSG7 DQ200 или "как ездить так, чтобы DSG не сломалась?"
6. Типовые неисправности DSG7 0AM по версии VAG
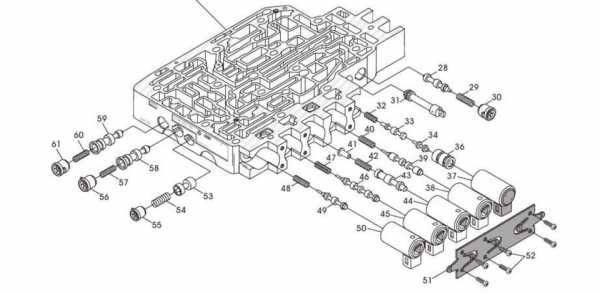
Продолжаем говорить о мехатронике DSG7 DQ200.
Ещё одна, но не так часто встречающаяся проблема мехатроника – может сочиться масло через штоки сцеплений. Эта проблема особенно опасна тем, что масло может попасть на диски сцепления, и, в таком случае, сцепление начнёт пробуксовывать и потребует замены, т.к. отмыть его от масла будет сложно (впрочем, попытаться можно, но на ваш страх и риск).

В таком случае необходима замена сальника (манжеты) штока, через который сочится масло.
Манжеты штоков сцепления – 0AM325091E

Также продаются штоки в сборе и ремкомплекты (что примечательно, ремкомплекты официальные, поэтому официальные дилеры с некоторого времени при наличии данной неисправности имеют возможность ремонтировать мехатроник, а не менять его в сборе). Стоит учитывать, что штоки сцепления имеют некоторые отличия. На автомобилях с 2012 м.г. штоки выжима сцепления были укорочены на 2 мм относительно автомобилей до 2012 м.г. Их каталожный номер – 0AM325091F

Полный размер
Длинные штоки устанавливаются на мехатроники 0AM325025D, а короткие – на другие, более свежие модификации, с другими каталожными номерами (025H, K, L, M, N, возможно, и другие).
Штоки выжима сцепления для мехатроников, установленных на автомобилях до 2012 м.г., имеют каталожный номер 0AM325091E (0AM325091D).
Если установить более короткие штоки сцепления вместо длинных, коробка будет думать, что сцепления изношены и может писать ошибки, хотя по факту сцепления будут в норме.
Ремкомплект штоков (длинные, под старые мехатроники) – 0AM398090 (информация неточная)
Ремкомплект штоков (короткие, под новые мехатроники) – 0AM398091 + 0AM398091A (по каталогу идёт 2 номера — в первый входят 2 сальника (манжеты) и монтажная втулка, во второй — 2 поршня и монтажная втулка. По факту дилерам приходят комплекты с номером 0AM398091A, в который входит всё вышеперечисленное. Как будет у вас при попытке сделать заказ — неизвестно, нужно проверять).
Картинка, которую удалось найти в гугле по запросу каталожных номеров:

Полный размер
Так выглядит коробка ремкомплекта:

Полный размер
Ещё одна редкая проблема – ломается одно ухо стопорного кольца штока:

Номера стопорных колец найти не удалось, так что, видимо, придётся подбирать по размеру в случае возникновения проблемы.
Сальник толкателя вилки переключения передач – 0AM325413A

Гидравлические плиты.
В конце 2012 – начале 2013 года, следом за изменениями в клапанах регулирования давления, было произведено изменение центральной гидравлической плиты, которое оказалось не совсем удачным.
Причиной, вероятно, была попытка производителя решить широко известную проблему потери герметичности контура высокого давления в результате возникновения трещины в стенке гидроплиты в месте крепления аккумулятора давления.
Трещина в гидравлической плите мехатроника DSG7 0AM/0CW:

Изменение состояло в том, что стенка, удерживающая аккумулятор давления, получила некоторое подобие рёбер жесткости.
Вопреки ожиданиям, конструкция не только не приобрела дополнительную прочность, но, как показывает практика, стала даже менее надежной.
Гидравлическая плита DSG7 0AM/0CW с рёбрами жесткости:

Если раньше в результате возникновения трещины происходила небольшая потеря давления масла в контуре, то её отчасти можно было скомпенсировать постоянной работой гидравлического насоса, и автомобиль при этом мог продолжать движение некоторое время, пока потеря давления не станет слишком большой (после этого коробка встанет в аварийный режим, в блоке появятся ошибки P17BF – Гидравлический насос защита от игры, P189C – Ограничение работоспособности вследствие недостаточного роста давления). Отремонтировать мехатроник в этом случае можно, заменив гидроплиту, установив сторонний ремкомплект гидроаккумулятора или же заварив трещину (на мой взгляд, метод ненадёжный несмотря на то, что некоторые в интернете хвастаются тем, что освоили методику грамотной сварки). Остальные компоненты мехатроника при этом не страдают.
Плиты нового образца, помимо старых проблем, добавили новых. А именно, в некоторых случаях возникновение трещины в плитах нового образца может приводить к дальнейшему полному или частичному разрушению стенки, удерживающей аккумулятор давления, с последующим «выстрелом» аккумулятора и выбиванием крышки мехатроника. В данной ситуации автомобиль мгновенно теряет способность передвигаться, со всеми вытекающими из этого неудобствами и сложностями, а бюджетный ремонт гидроплиты становится невозможным, в любом случае требуется её замена. Точно известно, что данной проблеме подвержены автомобили Skoda, мехатроник которых выпущен в период с 1 недели 2013 года до 35 недели 2013 года включительно. Можно предположить, что на других марках концерна проблема особенно остро присутствует на автомобилях 2013 года выпуска. Начиная с 36 недели 2013 года, по заявлению Skoda, внедрены изменения, направленные на решение данной проблемы.
Разрушение стенки гидроплиты DSG7 0AM/0CW:

Крышка мехатроника, выгнутая «выстрелившим» аккумулятором давления:

Позднее в начале 2017 года производитель предпринял попытку скомпенсировать данный просчёт путём изменения программного обеспечения с целью снизить верхнюю границу рабочего диапазона давления в мехатронике с 60 до 52 Бар, для чего была организована соответствующая сервисная акция.
Полезность данного изменения вызывает ряд споров и сомнений, поскольку вследствие снижения общего «запаса» по давлению возникает необходимость более частого включения электрического насоса (бесщёточного типа) для поддержания рабочего давления, что может не лучшим образом сказаться на его ресурсе. Впрочем, проблем с насосом пока замечено не было.
Различия в неисправностях ранних и модернизированных гидроплит заключаются, предположительно, в составе сплава, из которого они изготовлены. Трудно сказать, какой состав в какие годы применялся, точных данных мне найти не удалось. Можно лишь сказать, что в разные годы состав гидроплиты мог быть AISi12Cu1(Fe), ADC12 и ADC12Z, и AISi11Cu2(Fe). Судя по фото, найденным в сети, именно гидроплиты, сделанные из сплава ADC12Z, наиболее подвержены вырыва
Что такое мехатроник?
 Что такое мехатроник? Простым языком о сложном агрегате.
Что такое мехатроник? Простым языком о сложном агрегате.
В конструкции коробки DSG, мехатронный модуль заслуживает особого внимания.
Ведь именно благодаря нему, обычная механическая КПП превратилась в роботизированную.
Данный блок – это электронный «мозг» трансмиссии, переключающий передачи и управляющий всеми узлами.
Техническое устройство
Мехатронный модуль имеет довольно скромные размеры, и размещается прямо в картере коробки передач.
В то же время, для своей работы он задействует:
- Электронный блок управления;
- Гидроблок, с выделенным масляным контуром;
- Более десятка различных датчиков;
- Исполнительные механизмы, представленные сервоприводами и электромоторами.
Чтобы мехатрон мог справляться со своими функциями, каждый из этих элементов должен быть исправен и выполнять поступающие команды.
К примеру, датчиковая аппаратура служит для сбора данных со всех систем автомобиля.
Во время движения машины, измеряется температура трансмиссионного масла, уровень давления в КПП, скорость вращения валов и другие рабочие параметры.
Опираясь на эту информацию, прибор подает сигналы и приводит в действие исполнительные механизмы.
Какие процессы зависят от мехатроника?
Говоря простым языком, mechatronic полностью управляет трансмиссией.
Модуль определяет, в какой момент повысить/понизить передачу, а затем контролирует этот процесс.
В частности, мехатрон координирует работу двойного сцепления.
Он обеспечивает плавное и быстрое переключение, за счет чего весь процесс занимает доли секунды.
Также mechatronic выступает связующим звеном.
Благодаря нему, другие узлы трансмиссии действуют синхронно и получают минимальную нагрузку.
Если же модуль сломался или полностью вышел из строя, состояние машины приравнивается к аварийному.
Использовать авто с неисправным блоком крайне не рекомендуется – это небезопасно, а также может сильно усугубить поломку.
Заметив неполадки, записывайтесь к нам на диагностику - мы поможем устранить поломку с минимальными затратами.
Визитная карточка нашей мастерской - 24 месяца честной гарантии и аргументированные тарифы.
Чем отличаются мехатроники?
Каждый поколение коробки DSG, оснащается своим мехатроном.
Это значительно усложняет замену неисправного блока.
Поэтому если Вас интересует установка нового модуля – приезжайте в профильный сервис.
Мы подберем подходящий агрегат, а затем прошьем его под характеристики Вашей машины (указывается объем двигателя, передаточные числа и т.д.).
Также к нам можно обратиться для восстановления мехатроника, адаптации КПП, компьютерной диагностики и по любым другим вопросам, касающимся проблем с DSG.
Более 10 лет опыта позволяют грамотно устранять поломки любой сложности.
Звоните, чтобы узнать больше о нюансах ремонта и договориться о времени Вашего визита.
Читайте интересную информацию
Что такое мехатроник в DSG?
Коробка передач преселективного типа изготавливается с гидравлическим электронным блоком – мехатроником.
Функции мехатроника
Фактически это корпус, внутри которого помимо электронных, гидравлических компонентов расположен ЭБУ. Сюда же подключаются разные детекторы, обеспечивающие слаженную работу АКПП. Благодаря датчикам в электронный блок управления поступает основная информация:
- температура масла;
- частота, с которой вращается выходной, входной вал;
- уровень давления.
Электронная система анализирует поступающие сведения и генерирует управляющие сигналы, переправляемые на блок гидравлики, в котором срабатывает контур. Если хотя бы один из компонентов не может справляться со своими функциями, то требуется ремонт мехатроника Ауди A4, от которого зависит работоспособность РКПП. Дисфункция системы приведёт к тому, что будет нарушен принцип сбора, анализа информации и передачи сигналов, из-за чего лучший момент для переключения будет упущен и станет невозможной регулировка этого процесса. Сломанный мехатроник не сможет осуществлять мониторинг фрикционной муфты, по причине чего, машина может просто остановиться.
Функции мехатроника намного шире, нежели просто управление переключением передач. Блок трансмиссионного управления обрабатывает сигналы, поступающие от двигателя, сервоприводов, сцепления. Такая загруженность снижает надёжность, так как поломка может случиться, в том числе, из-за неисправности мотора.
Конструкция мехатроника
Конструкция мехатроника включает основные компоненты, расположенные определённым образом:
- ЭБУ помещают в корпусе АКПП;
- плата управления находится в кожухе и зафиксирована на корпусе гидравлического блока;
- механический распределитель вкупе с электронной частью формируют блок управления.
Благодаря такой конструкции производители уменьшили метраж проводки, соединили несколько блоков, упростили установки мехатроника. Гидравлический блок имеет вид массивной алюминиевой плиты, на которой объединяют соленоиды с клапанами. Плата управления помещается в пластиковый корпус и также фиксируется поверх гидроблока. Именно к ней будут подключаться электрические схемы машины и АКПП посредством круглых разъёмов. Контакты соленоидов подключаются к плате парами контактов и устанавливаются в один ряд, сверху и снизу.
Признаки неисправности
Основная задача водителя вовремя определить неисправности по основным признакам:
- толчки – возникают в период набора скорости или в момент переключения;
- вибрации – присутствуют при разгоне;
- передачи не включаются;
- переключение затягивается.
Диагностика и ремонт
Если возникают такие симптомы, то причина заключается либо в неисправном сцеплении, либо в поломке мехатроника. Чтобы провести ремонт и замену АКПП группы vag https://vag-id.ru/, нужен специальный диагностический кабель. Проверка проводится через ПК, на котором установлено соответствующее программное обеспечение. Процедура диагностики занимает не больше получаса. Надо сравнить полученные показатели с настройками производителя, что позволит расшифровать ошибки, коды.
Проведение ремонта заключается в следующем:
- промывка гидравлического блока и установка новых прокладок, уплотнителей;
- восстановление электронной платы;
- дефектовка распределителей, как механических, так и электрических;
- дефектовка клапанов, регуляторов, золотников.
Правильная эксплуатация АКПП и своевременный ремонт помогут избежать серьёзных поломок, в результате которых придётся менять мехатроник.
Мехатроника — Википедия. Что такое Мехатроника
Мехатро́ника — это область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающими проектирование и производство качественно новых механизмов, машин и систем с интеллектуальным управлением их функциональными движениями.
Цели, задачи и методы

Развитие мехатроники осуществляется на базе объединения сведений из ряда разнородных и обособленных областей: прецизионной механики, электротехники, микроэлектроники, информационных технологий, силовой электроники и других научно-технических дисциплин. Считается, что результат их совместного использования можно назвать «истинно мехатронным» только тогда, когда его компоненты образуют систему, обладающую принципиально новыми свойствами, которых не наблюдается у составляющих её частей[1].
Основной целью мехатроники, как научно-технической дисциплины, является разработка принципиально новых функциональных узлов, блоков и модулей, реализующих двигательные функции, которые используются как основа для подвижных интеллектуальных машин и систем. В связи с этим, предметом мехатроники становятся технологические процессы проектирования и выпуска систем и машин, способных реализовать требуемый двигательный функционал. Методология, используемая в рамках мехатроники, опирается на взаимную интеграцию технологий, структурных элементов, информационных и энергетических процессов из целого перечня естественно-научных и инженерных направлений (информатики, точной механики, микроэлектроники, автоматического управления и т. п.), которые обладают различной физической природой и, все вместе, закладывают в основе мехатроники её междисциплинарную сущность[2]. Таким образом, стремясь к системному подходу мехатроника воплощает в себе преодоление клaссического научного принципа декомпозиции[3].
О термине
Начиная c 1930-х годов в некоторых зарубежных странах (см. департамент Drive Technology фирмы Siemens) и СССР для названия систем обеспечения требуемых движений посредством электричества применяется термин электрический привод (сокращенно электропривод).
С развитием электрических приводов и возможностей их применения в индустриально-производственных и транспортных системах, стала очевидна необходимость полной интеграции составляющих элементов электропривода: механики, электрических машин, силовой электроники, микропроцессорной техники и программного обеспечения для наиболее полного использования возможностей электропривода и обеспечения им прецизионного движения.
Так как наиболее полное развитие данные тенденции получили в Японии, а с термином «электрический привод» как самостоятельной технической системой там знакомы не были, для описания данных систем в Японии был введен термин «мехатроника». Непосредственным автором является японец Тецуро Мори (Tetsuro Mori), старший инженер компании Yaskawa Electric, а сам термин появился в 1969 году[4].
Термин состоит из двух частей — «меха-», от слова механика, и «-троника», от слова электроника. Сначала данный термин был торговой маркой (зарегистрирована в 1972 году), но после его широкого распространения компания отказалась от его использования в качестве зарегистрированного торгового знака.
Из Японии мехатроника распространилась по всему миру. Из иностранных изданий термин «мехатроника» попал в Россию и стал широко известен.
Сейчас под мехатроникой понимают системы электропривода с исполнительными органами относительно небольшой мощности, обеспечивающие прецизионные движения и имеющие развитую систему управления. Сам термин «мехатроника» используется, прежде всего, для отделения от общепромышленных систем электропривода и подчеркивания особых требований к мехатронным системам. Именно в таком смысле мехатроника как область техники известна в мире.
Связанные понятия
Стандартное определение (1995):
Мехатронный модуль — это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и синергетической аппаратно-программной интеграцией составляющих его элементов, имеющих различную физическую природу.
К элементам различной физической природы относят механические, электротехнические, электронные, цифровые, пневматические, гидравлические, информационные и т. д. компоненты.
Мехатронная система — совокупность нескольких мехатронных модулей и узлов, синергетически связанных между собой, для выполнения конкретной функциональной задачи.
Обычно мехатронная система является объединением собственно электромеханических компонентов с силовой электроникой, которые управляются с помощью различных микроконтроллеров, ПК или других вычислительных устройств. При этом система в истинно мехатронном подходе, несмотря на использование стандартных компонентов, строится как можно более монолитно, конструкторы стараются объединить все части системы воедино без использования лишних интерфейсов между модулями. В частности, применяя встроенные непосредственно в микроконтроллеры АЦП, интеллектуальные силовые преобразователи и т. п. Это уменьшает массу и размеры системы, повышает её надёжность и дает некоторые другие преимущества. Любая система, управляющая группой приводов, может считаться мехатронной.
Иногда система содержит принципиально новые с конструкторской точки зрения узлы, такие как электромагнитные подвесы, заменяющие обычные подшипниковые узлы. Такие подвесы дороги и сложны в управлении и в нашей стране применяются редко (на 2005 г.). Одной из областей применения электромагнитных подвесов являются турбины, перекачивающие газ по трубопроводам. Обычные подшипники здесь плохи тем, что в смазку проникают газы — она теряет свои свойства.
Мехатроника сегодня
Многие современные системы являются мехатронными или используют элементы мехатроники, поэтому постепенно мехатроника становится «наукой обо всём». Мехатроника применяется во многих отраслях и направлениях, например: робототехника, автомобильная, авиационная и космическая техника, медицинское и спортивное оборудование, бытовая техника.
Примеры мехатронных систем
Учебная мехатронная система: учебный робот SCORBOT-ER 4u обслуживает настольные станки с ЧПУТипичная мехатронная система — тормозная система автомобиля с АБС (антиблокировочной системой).
Персональный компьютер также является мехатронной системой: ЭВМ содержит много мехатронных составляющих: жёсткие диски, оптические приводы[1].
См. также
Примечания
- ↑ 1 2 Подураев Ю. В. Введение // Мехатроника: основы, методы, применение. — 2-е. — М.: «Машиностроение», 2007. — С. 10. — 256 с. — ISBN 978-5-217-03388-1.
- ↑ Подураев Ю. В. Понятие о мехатронике // Мехатроника: основы, методы, применение. — 2-е. — М.: «Машиностроение», 2007. — С. 16. — 256 с. — ISBN 978-5-217-03388-1.
- ↑ Б. М. Готлиб. Предисловие // Введение в мехатронику. Учебное пособие. — Екатеринбург: Уральский государственный университет путей сообщения, 2007. — С. 8. — 782 с.
- ↑ Б. М. Готлиб. Мехатроника - основа интеллектуальной техники нового поколения // Введение в мехатронику. Учебное пособие. — Екатеринбург: Уральский государственный университет путей сообщения, 2007. — С. 11. — 782 с.
Литература
- Мехатроника: Пер с япон. / Исии Х., Иноуэ Х., Симояма И. и др. — М.: Мир, 1988. — С. 318. — ISBN 5-03-000059-3
- Введение в мехатронику: В 2-х кн. Учебное пособие / А. К. Тугенгольд, И. В. Богуславский, Е. А. Лукьянов и др. Под ред. А. К. Тугенгольда. — Ростов н/Д: Издательский центр ДГТУ, 2004. — ISBN 5-7890-0294-3.
- Карнаухов Н. Ф. Электромеханические и мехатронные системы. — Ростов н/Д: Феникс, 2006. — 320 с. — (Высшее образование). — 3000 экз. — ISBN 5-222-08228-8.
- Егоров О. Д., Подураев Ю. В. Конструирование мехатронных модулей. — М.: Издательство МГТУ «Станкин», 2004. — 368 с.
- Брага Н. Создание роботов в домашних условиях. — М.: НТ Пресс, 2007. — 368 с. — ISBN 5-477-00749-4.
Ссылки
Основные направления развития мехатронных систем (интеграция, интеллектуализация, миниатюризация) :: Электроника для всех
09.01.2015 14:53Направления развития (становления) мехатронных систем можно проследить с разных позиций. Например, одним из таких признаков является уровень интеграции (синергетического объединения) элементов, к числу которых относятся элементы механических, электромеханических, электронных и компьютерных (информационных) модулей (рис. 1).
Синергия - это совместное действие, направленное на достижение единой цели.
Модуль - это унифицированная функциональная часть машины, конструктивно оформленная как самостоятельное изделие
Мехатронные модули – это базовые функциональные компоненты мехатронных систем и машин с компьютерным управлением, предназначенные для выполнения движений, как правило, по одной управляемой координате.
Такие модули могут объединять в одном корпусе несколько компонентов, например, двигатель, редуктор и датчики.
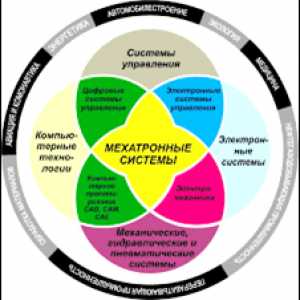
Рисунок 1 – Составные части мехатроники
Качественно новые свойства мехатронных модулей по сравнению с традиционными приводами достигаются синергетической интеграцией составляющих элементов.
Синергетическое объединение предполагает не простое соединение частей посредством интерфейсных блоков, но их конструктивное встраивание в мехатронные модули. Синергетическая интеграция элементов при проектировании мехатронных модулей основана на трех базовых принципах (функционально-структурный подход к проектированию МС):
- реализация заданных функциональных преобразований минимально возможным числом структурных и конструктивных блоков путем объединения двух и более элементов в единые многофункциональные модули;
- выбор интерфейсов в качестве локальных точек интеграции и исключение избыточных структурных блоков и интерфейсов как сепаратных элементов;
- перераспределение функциональной нагрузки в мехатронной системе от аппаратных блоков к интеллектуальным (электронным и компьютерным) компонентам.
В соответствии с признаком синергетического объединения можно исторически разделить мехатронные модули по уровням (определяющим ведущую тенденцию в современном машиностроении «от механики к мехатронике»).
Мехатронные модули первого уровня представляют собой объединение только двух исходных элементов. Типичным примером модуля первого поколения может служить «мотор-редуктор», где механический редуктор и управляемый двигатель выпускаются как единый функциональный элемент. Мехатронные системы на основе этих модулей нашли широкое применение при создании различных средств комплексной автоматизации производства (конвейеров, транспортеров, поворотных столов, вспомогательных манипуляторов).
Мехатронные модули второго уровня появились в 80-х годах в связи с развитием новых электронных технологий, которые позволили создать миниатюрные датчики и электронные блоки для обработки их сигналов. Объединение приводных модулей с указанными элементами привело к появлению мехатронных модулей движения, состав которых полностью соответствует введенному выше определению, когда достигнута интеграция трех устройств различной физической природы: механических, электротехнических и электронных. На базе мехатронных модулей данного класса созданы управляемые энергетические машины (турбины и генераторы), станки и промышленные роботы с числовым программным управлением.
Развитие третьего поколения мехатронных систем обусловлено появлением на рынке сравнительно недорогих микропроцессоров и контроллеров на их базе и направлено на интеллектуализацию всех процессов, протекающих в мехатронной системе, в первую очередь - процесса управления функциональными движениями машин и агрегатов.
Одновременно идет разработка новых принципов и технологий изготовления высокоточных и компактных механических узлов, а также новых типов электродвигателей (в первую очередь высокомоментных, бесколлекторных и линейных), датчиков обратной связи и информации. Синтез новых прецизионных, информационных и измерительных наукоемких технологий дает основу для проектирования и производства интеллектуальных мехатрон-ных модулей и систем.
В дальнейшем мехатронные машины и системы будут объединяться в мехатронные комплексы на базе единых интеграционных платформ. Цель создания таких комплексов - добиться сочетания высокой производительности и одновременно гибкости технико-технологической среды за счет возможности ее реконфигурации, что позволит обеспечить конкурентоспособность и высокое качество выпускаемой продукции на рынках XXI века.
Наряду с синергетическим объединением (интеграцией) элементов мехатронных систем другими квалификационными признаками развития мехатронных систем, по-видимому, следует признать их интеллектуализацию и миниатюризацию.
В настоящее время в мехатронных системах объем функций распределен между механическими, электронными и компьютерными компонентами практически поровну. При этом доля компьютерной части возросла за последнее 10-летие вдвое, и есть все основания прогнозировать сохранение этой тенденции в технике будущего.
Принципиально важно подчеркнуть, что тенденция перехода от механических к мехатронным технологиям в современном машиностроении не «закрывает» механику. Наоборот, это стимулирует ее развитие к интеграции с интеллектуальными компонентами в рамках единой мехатронной системы.
Системный подход диктует новые требования к встроенным механическим и гибридным компонентам, что в свою очередь ведет к развитию новых технологий и конструкторских решений в области механики.

Рис. 2 Динамика изменения составляющих "Механика - электроника - информатика"
На рис. 2 представлен характерный график (по данным журнала, выпущенного специально к Всемирной выставке «Промышленность, автоматизация и инновации» 2000 г.), который отражает динамику этого процесса в производственных машинах за 30 лет, начиная с 70-х годов. Анализ показывает, что еще в начале 90-х годов подавляющее большинство функций машины (более 70 %) реализовывалось механическим путем. В последующие десятилетия происходило постепенное вытеснение механических узлов - сначала электронными, а затем и компьютерными блоками. В настоящее время в мехатронных системах объем функций распределен между механическими, электронными и компьютерными компонентами практически поровну. При этом доля компьютерной части возросла за последнее 10-летие вдвое, и есть все основания прогнозировать сохранение этой тенденции в технике будущего.
Интеллектуальные системы управления - основа интеллектуального управления сложными динамическими объектами (мехатронными системами). Они априорно ориентированы на работу в условиях неполноты или нечеткости исходной информации, неопределенности внешних возмущений и среды функционирования, требуют привлечения нетрадиционных подходов к управлению с использованием специальных методов и технологий искусственного интеллекта совершенно нового класса. К числу таких технологий можно отнести информационные технологии на основе экспертных систем, нейросетевых структур, ассоциативной памяти, нечеткой логики.
Термин «искусственный интеллект - ИИ» (AI - artificial intelligence)., был предложен в 1956 г. на семинаре с аналогичным названием в Дартсмутском колледже (США). Семинар был посвящен разработке методов решения логистических, а не вычислительных задач. В английском языке данное словосочетание не имеет той слегка фантастической антропоморфной окраски, какую оно приобрело в довольно неудачном русском переводе. Слово intelligence означает умение рассуждать разумно, а вовсе не "интеллект", для которого есть термин intellect.
С течением времени развитие таких разделов искусственного интеллекта как инженерия знаний, компьютерная логика и лингвистика, методы и модели обучения, методы поиска и принятия решений и др. заложило теоретическую основу для создания высокоэффективных систем по обработке и использованию знаний для решения целого ряда прикладных задач, включая разработку систем, моделирующих творческие возможности человека. Такие системы и стали называть интеллектуальными.
Сегодня понятия интеллектуальная система и система, ориентированная на обработку и использование знаний, а не системы искусственного интеллекта, являются синонимами. Поэтому по аналогии с физическими системами, кибернетическими системами и т. п. логичнее употреблять термин «интеллектуальные системы», а применительно к области управления - термин «интеллектуальные системы управления».
В историческом аспекте, ранее при создании машин сначала выполняли базовое проектирование (с точки зрения физики и механики), а затем в качестве подсистемы разрабатывали системы управления. При этом обычные машины обладали свойством самоустойчивости и могли работать даже без информационных систем. Затем был разработан аппарат конфигурируемого управления - АКУ (CCV - control configured vehicle), согласно которому более эффективную машину можно спроектировать, если еще на этапе базового проектирования заложить основы системы управления (или хотя бы предположить существование такой системы). В отличие от обычной, спроектированная на основе использования концепции АКУ машина может реализовать свои функции только благодаря существованию системы управления. В случае АКУ существует механическая неустойчивость, которая часто оказывается необходимой для обеспечения соответствующих динамических характеристик. Устойчивость достигается благодаря наличию контуров управления. В настоящее время концепцию АКУ широко используют в самолетостроении.
Для реализации концепции АКУ несомненно неизбежным является существование информационной системы и системы управления. В этом смысле концепцию АКУ можно отнести к основным руководящим принципам мехатроники и считать, что она относится к понятиям самого высокого ранга. Однако при этом необходимо иметь в виду, что концепция АКУ предъявляет повышенные требования к надежности информационных и управляющих систем. Так, повреждение в электрической цепи двигателя, имеющего электронную регулировку впрыска топлива, приводит к остановке двигателя. Выход же из строя ЭВМ летательного аппарата означает его катастрофу.
Интерес к мехатронике, которая изначально понималась как некий симбиоз механики и электроники, в значительной степени связан с пересмотром ее фундаментальных основ с учетом принципов интеллектуального управления. Эта современная трактовка предполагает, что основой мехатронных систем, машин и т. д. является интеллектуальный мехатронный модуль (ИММ) или, точнее, конечный набор таких модулей.
ИММ должен включать в свой состав высокопроизводительный цифровой контроллер, ориентированный на решение задач обработки информации и управления в реальном времени на основе применения современных интеллектуальных технологий.
Таким образом, принципиальным отличием ИММ от комплектных электроприводов служит наличие интеллектуальной системы управления, которая в сочетании с традиционной (или новой) механикой позволит создать мехатронные машины и комплексы, обладающие значительно более высокими техническими характеристиками по сравнению с существующими образцами. Подобную точку зрения разделяют ведущие отечественные и зарубежные специалисты, говоря о мехатронном модуле движения как об интеллектуальном конструктивном элементе.
Развитие концепции мехатронно-модульного построения сложных электромеханических систем различной конструкции и назначения предполагает комплексное решение целого ряда важнейших проблем. К их числу в первую очередь следует отнести разработку быстродействующих алгоритмов управления, обеспечивающих инвариантность к различного рода возмущениям (что особенно важно для прецизионных систем), принципов динамической развязки быстродействующих приводов с учетом компенсации взаимного влияния отдельных степеней подвижности, алгоритмов управления движением, инвариантных к типу кинематической схемы многозвенного мехатронно-модульного механизма, а также универсальных средств программирования, обеспечивающих возможность постановки прикладных задач на уровне описаний конечных технологических целей.
Пути решения данных проблем имеют по существу два направления:
- разработка высокоскоростных аппаратных средств вычислительной техники;
- разработка специальных алгоритмов на основе современных методов и технологий обработки знаний.
Если первый путь является вполне естественным для японской электронной промышленности с ее высокоразвитой технологической базой, то для России второй представляется более предпочтительным в связи с перспективами использования современных интеллектуальных технологий, уникальные возможности которых достаточно изучены и могут служить эффективной основой как при создании машин нового поколения, так и при модернизации существующего парка оборудования. В соответствии со вторым направлением в России развернут ряд крупных проектов, в частности, по разработке мехатронных узлов обрабатывающих центров XXI в. для тяжелого машиностроения, аэрокосмической, автомобильной и других отраслей промышленности.
В наши дни управление на основе анализа внешних ситуаций (событий) остается одной из ключевых идей интеллектуального управления техническими и организационными системами. Другой базовой идеей является использование средств современной информационной технологии обработки знаний при поиске управленческих решений и формировании соответствующих управляющих воздействий.
По мере совершенствования систем, ориентированных на хранение, пополнение, обработку и использование знаний, начали создаваться системы, в которых результаты принятия решений приближаются по качеству к решениям, принятым человеком-оператором, а по скорости получения решений существенно превышают время реакции человека (особенно в непредсказуемых и непредвиденных ситуациях).
Возникла идея активизировать деятельность систем путем включения в их состав специальных дополнительных блоков формирования управляющих воздействий на основе принятых решений. Такие интеллектуальные системы, непосредственно подключенные к объекту, получили название «активные системы».
Интеллектуальные системы в последнее время стали весьма распространенным коммерческим продуктом, находящим широкий спрос пользователей-специалистов в самых разнообразных областях инженерно-технической и научно-технической сфер деятельности.
Переходим к рассмотрению третьего квалификационного признака развития мехатронных систем - миниатюризации.
Сегодня вопросы миниатюризации являются ключевыми во всех отраслях производства, важнейшее значение они имеют в микроэлектронике, нано-технологиях, генетике и других перспективных направлениях.
Существенное различие уровней развития техники, соответствующих мехатронике и электромеханике, обусловлено, прежде всего, появлением микроэлектроники. Микроэлектроника обеспечила существенное развитие мехатроники.
Современные микроэлектронные устройства обеспечивают принципиально новые возможности для объединения (интегрирования) механики и электроники, которые по своему уровню значительно превосходят существовавшую ранее электромеханику.
Микроэлектроника играет ключевую роль в реализации машин нового поколения - мехатронных модулей и систем (в частности, микроэлектромеханических систем - МЭМС). Можно смело утверждать, что в настоящее время зародилось новое направление в мехатронике - микромехатроника.
По габаритным размерам электромеханические системы (ЭМС) условно можно разделить на три класса:
- миниатюрные имеют размеры в пределах от 10х10х10 мм до 50х50х50 мм;
- микросистемы, размеры которых находятся в диапазоне от микрометра до нескольких миллиметров;
- наносистемы имеют размеры порядка ста нанометров (1 нм = 10-9 м).
Мехатронные системы микро-перемещений должны обладать достаточно высокой точностью: минимальный шаг обычно не превышает 1 % максимального хода. Для создания устройств с такими характеристиками актуальны принципы мехатроники, базирующейся на соединении в единую систему механических, электронных и электромеханических частей.
Основные преимущества мехатронных систем микромеханики заключаются в компактности модулей и улучшении динамических характеристик вследствие упрощения кинематических цепей, а также высокой надежности и помехозащищенности.
Мехатрон! — Volkswagen Polo Hatchback, 1.4 л., 2012 года на DRIVE2
Когда в записи выбираешь "о чем" хочется выбрать "Война с Авто"
У Меня же не Авто Бот. Бамбл Би… я Владею ДЕСИПТИКОНОМ.
и что же произошло? а вот что… вчера, весь в раздумьях о поломке кондея, а скорее всего вентилятора салонного Решил: Поеду помою свою ласточку хорошенько, и заодно моторный отсек вычищу к летнему сезону…
немного взбодрился, даже повеселел. мою все, чищу, радостный. думаю вот сказка, прямо захотелось покататься по городу, с музыкой в кайф, перед рабочми днями… Ну Ну … когда все высохло, присмотрелся
Что за Х.ня? Ну что ОПЯТЬ? Запотевание справа внизу !
Молился и одновременно, дрожащими руками начал прощупывать… Откуда? Откуда же ты? хоть бы с мотора
почему с мотора? да все просто с мотором я попаду тысяч на 50… а чего я боялся? правильно что бы не КОРОБАС…
Я думаю вы всё поняли Господа и Дамы! КОРОБАС… ООО ДА . кайф, масло с мехатроника? сколько масла там? я вот знаю, там, 1.8-1.9 литра масла. а вот сколько же вытекло? неизвестно. течи нет, поэтому не заметил, могло начаться зимой, могло весной, мотор не мыл, пылью все забрало, но думаю что не больше 10.000 км, так как не предыдущем то точно все было норм, т.к сразу бросается в глаза.
Куда Же я поехал?)))
в Свой Любимый Сервисный Центр. Встречали как Родного. а почему?
да потому что помнят, когда зашел
Здоровались за 30 метров и на сближение, как погода, как жизнь, родные как? что же с машиной ?..)))
Приняли сразу, забитость была хорошая, но я уже ехал и сказал что буду через 20 минут. окошко нашли.
Продиагностировали от и до, (сделали пару замечаний, барабанные колодки под замену, и запотевание птф) подлили антифриза, пару грамм, сам че то воды не купил подлить а зона еще не критична была.
С кондеем сказали, делай вентилятор, или покупай. за ту сумму что он стоит, надо пробовать чинить)))
а что же с запотеванием? АХАХА приговор Мехатрон
Что делать? не поверите… Ездить пока не умрет, и готовить 125.000 за него и за работу.
а Гарантия скажете вы? О ДА гарантия еще есть… осталось полтора года и 20.000 пробега.. А Гарантийный ли случай? НЕТ… а Почему? да все просто "ЗАПОТЕВАНИЕ НЕ ТЕЧЬ"…
Ну так как я дружен и с директором, и с гарантийщиком, а так же с приемщиком, и со вторым приемщиком. то с утра будем решать вопрос, как Сделать Течь вместо запотевания, ибо она может и не потечь за 30.000 км и сдохнет четко после гарантии… Эпопея Началась!..))))
Мехатроника – что это такое и кем является мехатронщик
Сегодня мехатроника – одно из основных направлений развития современной науки и техники. Развитие мехатроники связано с появлением новых технологий, поиском новых технических решений для увеличения скорости работы электронных устройств. Все вычислительные приборы, навигационные приборы и офисная техника – это и есть прогресс мехатроники.

Мехатронщик – это человек, который объединяет в себе знания и компетенции разных специальностей, таких как: инженер-механик, специалист по компьютерным системам, инженер-электронщик, специалист по гидро-пневмоприводу
В своей профессии мехатронщики обычно имеют дело с роботизированными механизмами, разрабатывают и проектируют системы управления всевозможными технологическими процессами, от автоматических парковок для автомобилей и крупных автоматизированных складов бытовой электроники, до линии производства йогуртов.
Сегодня мехатроника находит широкое применение во всех областях производстваи техники. Наличие мехатронных модулей – отличительная черта современного производства – надёжного, технологического, производительного и недорогого.
Для обучения этой творческой профессии в Поволжском колледже оборудована лаборатория Мехатроники и Робототехники, где обучающиеся разрабатывают и придумывают, как и с помощью какого оборудования роботизировать процесс производства мороженого, мебели, автомобильных покрышек, смартфонов.

Часть 3. "Мехатроник" или почему "Адский муравейник" всегда на слуху. — Turbo-Union на DRIVE2
Введение : Просмотрев большой объем материала про данный тип АКПП, никак не мог избавится от мысли, что в большинстве случаев замена элементов крупными законченными блоками(узлами), имеющее место в большинстве предложенных вариантов решения проблемы, обусловлена особо ярко выраженным нежеланием сервиса повторять ремонт еще раз в большей степени, чем с какой либо другой трансмиссией в прошлом . Действительно, речь, например, всегда идет о замене сцепления на полностью собранное блоком, попытки поменять «то что стерлась»(сами фрикционные диски) приводят к тому, что машина хоть и начинает передвигаться, но делает далеко не так, как хотелось бы владельцам принося дискомфорт . Если же касаться Мехатроника, как одного из самостоятельных узлов, коробки ДСГ, в большинстве случаев речь чаще идет о замене его целиком, конечно, существуют определенные рем.комплекты, например по внутреннему жгуту проводки, комплект выглядит так .

В который входят помимо жгута не только клапана выбора передач, но и клапан регулировки линейного давления, а также прокладки и даже крепеж самих клапанов . Но, как известно, на коробках ДСГ группы VW такой комплект очень редко помогает решить проблему с переключением, как и разные виды апгрейда прошивок . Почему чаще всего, все таки приходится менять всю «волшебную коробочку « под названием Мехатроник на автомобилях группы VW мы сегодня и поговорим, а также обязательно сравним с другими конструкциями подобного действия, поскольку Вы наверное заметили, что в комплект ЖГУТА почему то включается клапана управления и линейного давления, начнем именно с этого вопроса)) . Итак первый весомый пункт назовем так .
1.Конструкция отдельного клапана гидравлического управления ДСГ6 ( «мокрое сцепление «) как начальная стадия большой проблемы .
Небольшое отступление, дело в том, что обслуживая автоматические коробки передач, мы привыкли к тому, что большинство электронных компонентов для «гигантов» трансмиссионного строения таких как ZF или Aisin делали определенные фирмы, которые уже, что называется «набили руку», в качестве примера можно привести фирму Rostra . Сами эти узлы довольно часто подразумевали «туннельное « исполнение, где сам клапан с индуктивной обмоткой носил больше вспомогательную роль, менялась только электрическая часть, в то время как плунжерная часть составляла единое целое с корпусом, и разумеется изготовление у них имело общий производственный и диагностический цикл .
Начиная с первых 4-х ступенчатых коробок в качестве примера можно привести 1М, 095, 099 по Vag технике …
Полный размер
Это те самые коробки в котором существовало дублирование управления давлением, когда электромагнитные клапана работали с рабочим давлением не непосредственно, а служили своеобразными «ключами « для управления уже механическими клапанами и при этом максимальное давление в гидросистемах не достигало и 25 Бар .Стоит ли удивляться надежности таких коробок ?
Данное конструктивное решение плавно «перекочевывало» через 5, 6 -ти ступенчатые системы, современные 7 –ступенчатые коробки выглядят так –же .

Ну скажите, разве можно придумать себе ситуацию когда в штатном режиме, при нормальном охлаждении масла, могут быть проблемы с клапаном такой конструкции ?

Были ли проблемы с такого типа платами клапанов ? Ну, разумеется были, в основном именно из за загрязнения разнообразных переходных дросселей и перепускных клапанов и происходило это обычно за … 200 000 км пробега . Тогда еще не «модно « было заниматься заменой масла в АКПП в принципе(сейчас тоже не редко встречается такой отношение «на весь срок службы», хотя европейские производители все таки вынуждены были вставить смену масла в цикл технического обслуживания )) Но можно ли говорить о таком загрязнении каналов управления через 30 -45 000 км? Если честно – с трудом . Мы уже говорили о сравнительном анализе конструкций сцеплений производителей, коснемся этого вопроса и здесь . Довольно часто сравнивают надежность ДСГ от разных производителей и одним из своеобразных эталонов «безпроблемности» считается Поршевская коробка PDK, а как интересно тут обстоит дело с нашим вопросом ? ))
Полный размер
Все нормально обстоит по этому вопросу и по делу ))…Практически идентичен гидроблоку АКПП с такой же массивной корпусной частью, и торцевым расположением клапанов .Ничего лишнего и все плоское и компактное . Ну хорошо, скажите Вы, но это все таки продольная коробка, а как дела с «дефицитом места» на поперечной ? А я отвечу, и на поперечной коробке можно найти оптимальное решение)) …

Полный размер
Согласитесь, многие, при первом анонсе ДСГ, ожидали подобного решение и от VAG- а, ведь его официальный курс на повсеместное внедрение такого типа коробок в массовое производство, подразумевает использование проверенных схем, отзывные компании в таком количестве весьма затратное дело)) . Но, экономия при создании автомобилей малого -среднего класса, увы, имеет и обратную сторону … Модели преселективных коробок VW AG с общим картером, или коробки с «мокрым« сцеплением отличались интересной конструктивной особенностью . Сам корпус Мехатроника получается достаточно массивным .

Полный размер
На нем есть интересные элементы .

Полный размер
Клапаны управления имели «накладное « расположение и выполнялись вместе с гидравлической частью … Внешне кажется, что толщина самой плиты управления значительно сокращается, но фактически, учитывая, скажем, расположение клапанов на DSG 500 не слишком видно, что уменьшаются габариты самого Мехатроника )).

Полный размер
Вот о такой составляющей единице как данный клапан мы и поговорим более подробно .Начнем с того, что это изделие выпускает не совсем «гидравлическая фирма « а именно …

Полный размер
Несколько неожиданно увидеть данный логотип не на упаковке с турбокомпрессором, не правда ли?) Устроен клапан предельно просто, в зависимости от назначения он может быть оборудован встроенным гидроаккумулятором для сглаживания пульсаций давления при открывании /закрывании масляных каналов

Полный размер
А вот так выглядит внутренний золотник управления …

Полный размер
Материал который используется в корпусной и управляющей части трудно идентифицировать (очень похоже на магниевый сплав, но металлографическую экспертизу, как понимаете, провести не могу )), он очень легкий, в то же время не обладает некоторой "основательностью линий среза" алюминиевых сплавов известной на блоках клапанов старых АКПП . Почему, собственно, разрезал и достал ? Потому, что по факту на стенде данный клапан (как и целая россыпь других клапанов ) абсолютно не держит давление в каналах, т.е. грубо говоря, для понимания степени моего разочарования этим девайсом с*** со всех дырок )) . При этом никаких механических повреждений золотника не видно даже при сильном преувеличении, кроме этого плоскость прилегания, внешне без повреждений …

Полный размер
.имеет только ДВЕ точки крепления с очень малым контрольным моментом затяжки (очень легко перетянуть и деформировать плоскость прилегания ), во избежании проблем, одно время, даже сетчатую фильтр-прокладку в отзывной запрещали менять без видимых повреждений . Довольно часто спрашивают, почему собственно Мехатроник в сборе ? И что такое ремонт Мехатроника ? Ответ, как понимаете, в данном случае очевиден, при выходе одного клапана из строя, не факт, что остальные протянут больше (а их там около 8ми если считать и клапана линейного давления ) в сравнении с первым, а ЭБУ ДВС совершенно без разницы по какой именно неисправности светить «шестеренку « на комбинации приборов при выходе в аварийный режим .Каждый из них в цене от 4 -6 т.р вот и умножайте и не забудьте добавить в список, другие элементы в виде сеточных фильтров, обратные клапаны непосредственно в плите, механические золотники управления (также облегченные )) .Получается «точечным» ремонтом, как мы чиним, например, обычную современную автоматическую коробку, с тех же моделей, заменой всего лишь одного такого Ростровского клапана (по электрической неисправн
Мехатроника. Пора учиться - АвтоЭкспертиза.ру
Металлообрабатывающий станок за последние десятилетия претерпел огромные изменения. Его функциональность все меньше и меньше определяется механическими компонентами. Главное место отдается сложным электротехническим элементам, которые в комбинации с компьютерными и информационными системами работают и в станках, и в автомобилях, и в подъемниках, и в сложных диагностических приборах.
Такие интегрированные решения управляют противоблокировочными системами автомобиля, станка с ЧПУ для промышленного производства, унифицированным оборудованием для проектирования и разработки новых видов продукции. Даже находясь на домашней кухне, сегодня мы имеем дело с программируемыми бытовыми устройствами. Для создания такого мира и обслуживания таких инженерных подходов была придумана профессия мехатроника.
Область ее задач состоит в конструировании систем и оборудования в интерфейсах между механическими, электрическими и электронными компонентами. Это обстоятельство делает профессию мехатроника очень востребованной и уважаемой специалистами как в Германии, так и во всем развитом мире. Если вам это интересно, тогда стоит продолжить чтение, чтобы узнать: как можно стать мехатроником, как построена система обучения и какие знания и опыт должен иметь кандидат на обучение этой прекрасной и перспективной профессии.
Итак, что такое мехатроника? Как стать мехатроником? В каких областях человеческой деятельности востребованы знания и опыт квалифицированного мехатроника после завершения обучения? Давайте обо всем по порядку.
Что такое мехатроника
Легко заметить, что термин «мехатроника» сложился из двух слов: механика и электроника. Истоки этой профессии следует искать в точной механике. Само определение впервые было применено японским производителем промышленных роботов уже в 1970-е годы. Далее эта профессия закрепилась во всем мире и обозначает междисциплинарный подход в проектировании и разработке новых видов продукции, в производстве и реализации на рынке современных разработок и систем.
Уже по названию можно оценить, насколько междисциплинарно построена профессия мехатроника. В ней такие области, как механика, электрика/электроника и информатика, сплавлены в единую систему. Задача этой системы заключается в том, чтобы транспортировать, преобразовывать и сохранять энергию, материю и информацию. И реализовывать это в практические решения поставленных человеком задач.
 Это механическая лаборатория. Здесь студенты
самостоятельно изготавливают детали литьем из пластмасс.
А также практикуются в расточке, фрезеровке, сварке и др.
Это механическая лаборатория. Здесь студенты
самостоятельно изготавливают детали литьем из пластмасс.
А также практикуются в расточке, фрезеровке, сварке и др.Как стать мехатроником
Мехатроником можно стать различными способами: или через профессиональное обучение, или через обучение в институте или университете. С 1998 года профессию мехатроника можно освоить за 42 месяца путем получения теоретических знаний и практических занятий на промышленных предприятиях и в сфере обслуживания. Наряду с этим в настоящее время несколько десятков немецких вузов предлагают освоить профессию дипломированного инженера, или бакалавра/мастера по мехатронике подобно МВА. Некоторые университеты также предлагают построить дальнейшее обучение с получением высшего образования по мехатронике на основе уже полученных знаний на предприятии в режиме дуального обучения.
 Лабораторая роботизации, моделирования и программирования роботов
Лабораторая роботизации, моделирования и программирования роботовКакую возможность вы решите использовать, решать вам. Правда, при выборе следует учитывать некоторые факторы. Наряду с высокими окладами окончание университета дает вам преимущество и возможность работать в науке и заниматься научными исследованиями и разработками. Это очень важно, так как возможность профессионального и карьерного роста без высшего образования очень ограничена.
Кто захочет объединить преимущество собственного практического опыта с преимуществами высшего образования, может принять решение и пройти сначала дуальное обучение в Германии. Затем, будучи уже опытным специалистом с квалификацией, поступить мастером в высшее учебное заведение и стать незаменимым профессионалом, а в перспективе – ученым. Что касается дуального обучения на начальной фазе вашей жизни, то это – интегральное обучение и интенсивная практическая работа, например, на СТОА. Завершить образование можно, получив степень бакалавра или статус «Мастер Инжиниринг» в университете, техническом вузе или в институте другого профиля.
 Лаборатория визуализации и видеодокументирования проектов роботизации и 3D-моделирования. Здесь же проводятся обучения взрослых андрагогике. Кстати, это одна из тем, которой Александр Леонидович Шмайлов занимается уже более 10 лет
Лаборатория визуализации и видеодокументирования проектов роботизации и 3D-моделирования. Здесь же проводятся обучения взрослых андрагогике. Кстати, это одна из тем, которой Александр Леонидович Шмайлов занимается уже более 10 летОбзор учебных программ
Обучение в вузе научным, естествоиспытательским и техническим дисциплинам – достаточно напряженная и весьма непростая задача. В отличие от многих других инженерных дисциплин обучение по мехатронике менее нагружено теорией и больше ориентировано на практические навыки работы студентов не только головой, но и руками. Такой симбиоз представляет собой массу навыков профессионального ремесленничества в таких работах, как сварка, фрезерование, токарные работы, прокладка кабелей, расчеты цепей, 3D-моделирование, изготовление деталей и узлов, проектирование в соответствующих компьютерных программах, сборка и монтаж оборудования, узлов, агрегатов, программирование компьютерных систем, написание прикладных компьютерных программ.
Студенты проводят много времени в лабораториях и работают над своими проектами, как индивидуальными, так и групповыми. Многие вузы предлагают целиком практический семестр, который органично включен в общую программу высшего образования на квалификацию «бакалавр-мехатроник», «дипломированный инженер-мехатроник». Обычно такие практические семестры предусмотрены на последних курсах вуза.
 Профессор педагогики, который отвечает за обучение квалификации мастера деловой мехатроники подобно МВА
Профессор педагогики, который отвечает за обучение квалификации мастера деловой мехатроники подобно МВАОчень часто в течение такого практического семестра студент работает за границей, где от него требуется не только отличное знание предмета – мехатроники, но и высокий уровень знания иностранного языка. Такой опыт позволяет выпускнику вуза – дипломированному инженеру или бакалавру-мехатронику иметь большие преимущества. Студенты также могут иметь возможность участвовать в экскурсиях по предприятиям и получать таким образом широкое представление о потенциальных работодателях, и это тоже является частью программы обучения.
 Разработка данной высшей школы называется «сегвей»
Разработка данной высшей школы называется «сегвей»На первых курсах вуза в учебный план закладываются знания естествоиспытательских дисциплин. Помимо этого, даются общие знания, например, по таким дисциплинам, как измерительная техника и машиностроение. На старших курсах акцент смещается в сторону специализации. Получение степени бакалавра-мехатроника также имеет свою направленность и специализацию. Здесь обучение и получение высшего образования также направлено на поиск и анализ конкретных проблем и разработку уникальных решений.
Обучение на мехатроника в вузе имеет много интерфейсов, точек сопряжения и пересечений с обучением по электротехнике с тем преимуществом, что в данном виде высшего образования не предусматривается получение основ знаний в области механического машиностроения. Некоторые университеты предлагают программы обучения, включающие комбинированные курсы из электротехники и электромехатроники.
Если вы думаете о том, чтобы получить высшее образование по мехатронике, рекомендуется в начале получить обзор квалификаций, которые дают разные вузы, специализирующиеся как на электротехнике, так и на мехатронике. Квалификация, которую можно получить по окончании обучения в вузе, может звучать так: бакалавр-мехатроник или мастер-мехатроник. Время обучения в зависимости от курса и специализации может составлять от шести до десяти немецких семестров.

Многие университеты непосредственно перед началом обучения предлагают подготовительные курсы, на которых освежаются знания по основам математики. На первых двух семестрах их называют: «Год профессиональной ориентации»; даются необходимые знания по естествоиспытательским, инженерным и экономическим дисциплинам. Основной упор делается на такие предметы, как математика, физика и информатика. В последнем важное место отводится программе CAD.
На третьем и четвертом немецком семестре среди прочего изучаются такие модули, как сенсорика и акторика (подобласть техники привода), электроника, автомобильная мехатроника или программирование и инжиниринг. В заключение в зависимости от вуза и курса даются различные углубления и специализации. Но обязательными модулями во всех вузах являются такие дисциплины, как физика, математика, техническая информатика, материаловедение, электротехника, техническая механика, основы конструирования, кинематика и кинетика, программный инжиниринг (написание софта), мехатронные системы, сенсорика, акторика.
Углубляющие модули по выбору могут быть в основном из области электротехники, информатики или машиностроения. Не забыты также: экономика, маркетинг, менеджмент, а еще такие дисциплины, как техническая оптика, техника производственных зданий и сооружений, электрические приводы, производственное и продуктовое планирование, измерительная техника.
Студенты к окончанию бакалавриата должны сделать проект по мехатронике, в котором полученные теоретические знания и практические умения применяются в разработке и построении собственной машины-робота. Учащийся в этой работе должен реализовать определенные андроидные задачи. Например, машина-робот, которую он спроектировал, разработал, изготовил и «обучил», должна уметь перешагнуть препятствие и не упасть с рабочей площадки. Это задание довольно простое.
Оно может усложниться требованием создать трехногое транспортное средство с изменяющимся центром тяжести, которое способно преодолевать ограниченные по площади, но глубокие пустоты. Если проект был удачно протестирован и показал заданный результат – студент-выпускник может рассчитывать на диплом бакалавра. Если на демонстрации работы проект потерпел фиаско – диплом не выдается, но дипломнику позволяется переработать проект и вновь пройти тест.
Многие вузы имеют Numerus Clausus, в обиходе его называют NC. В случае обучения в вузах Германии это означает, что количество учебных мест при поступлении на ту или иную специальность ограничено. (Примеч. пер.: «нумерус клаузус» означает ограничение количества принимаемых на обучение абитуриентов в зависимости от выпускного балла оконченных ими учебных заведений). От вуза к вузу это число может серьезно отличаться. Поэтому вам желательно получить предварительную информацию по возможным Numerus Clausus каждого вуза. Они также могут отличаться от семестра к семестру. Поэтому вам предстоит в любом случае заранее обратиться к веб-страницам университета или института и получить информацию о возможных ограничениях.
Области и отрасли экономики, в которых могут работать мехатроники – выпускники вузов
Профессиональные возможности для мехатроников многочисленны и многообразны. Типичные работодатели для мехатроников – это фирмы, которые производят в промышленных масштабах оборудование и системы для управления производственными процессами. Кроме того – предприятия из отраслей автомобилестроения, авиационного и космического машиностроения. За счет знания выпускниками информатики они также имеют возможность работать в отраслях информационных продуктов и коммуникационной техники. В области медицины мехатроника начинает играть все большую роль, так что выпускники вузов по этой специализации могут найти хорошие возможности для высоких заработков и успешной карьеры, если посвятят себя медицинской технике.
Отрасль, которая не только в Германии, но и в международном масштабе приобретает все большее значение, это микро- и нанотехнологии. Это инновативное направление имеет огромный потенциал в ближайшем будущем, где знания и навыки мехатроников будут пользоваться значительным спросом. В первую очередь в разработке микромеханических компонентов или в биологической мехатронике. Основная задача мехатроника здесь – это разработка и планирование отдельных компонентов, а также их монтаж и сборка в сложные системы и установки. Кроме того, ввод в эксплуатацию, программирование и установка соответствующего программного обеспечения, а еще проверка, техническое обслуживание и ремонт станков и машин, приспособлений, механизмов, узлов и агрегатов – это области ответственности мехатроников.

Инженерное обучение – общий взгляд
«Подумайте о том, что собой представляют инженеры и техники, ведь они первые сделали демократию возможной. Они не только облегчили труд, ежедневный труд миллионов людей, но и сделали доступными труды великих мыслителей и гениальных художников и музыкантов», – так в свое время говорил Альберт Энштейн.
Наверное, самый гениальный инженер и изобретатель нового времени – это Томас Эдисон. Едва ли найдется человек, который его не знает. В эпоху индустриализации он изобрел фонограф и лампочку накаливания, сконструировал первую общественную электростанцию и работающую кинокамеру. В общем и целом он является автором более 2000 патентов на приборы и технологии, причем они настолько глубоко проработаны и завершены, что практически все имеют патентную зрелость.
В настоящее время от инженеров также требуются техническая дальновидность и изобретательский дух, а также ярко выраженное понимание современных технологических и конструкционных возможностей. Сюда добавляется еще и социальная, политическая и экологическая ответственность. Картина профессий и квалификаций за последнее время очень сильно изменилась, идет ли речь об автомобилях, телевизорах, компьютерах или мобильных телефонах – мы сегодня живем в высокотехнологизированном мире. НИОКР, эксплуатация и ремонт продукции и изделий становятся чрезвычайно сложными и ответственными задачами.
Инженер сегодня отвечает за строительство электростанций, производство оптико-волоконных трансатлантических кабелей, плазменных экранов мониторов, сателлитов и спутников, MP3-плейеров, фотосинтезирующих систем и гибридных автомобилей. Техника определяет, какова есть и, главное, какой будет наша жизнь, делает ее комфортнее, надежнее и эффективнее. Едва ли сегодня можно представить жизнь в Германии без посудомоечных комбайнов, микроволновых печей или легковых автомобилей. Часто мы даже не осознаем, что за всеми этими изобретениями и продуктами стоит огромное число инженеров. А что же, собственно, собой представляет инженер? В каких областях он работает, и как стать инженером?

На эти вопросы мы в дальнейшем намереваемся ответить в рамках нашего проекта «Мехатроника журнала АБС-авто». Планируем сделать и опубликовать серии статей с упором на необходимость осознания перехода России с подготовки инженеров-электриков, инженеров-механиков, инженеров-теплотехников, инженеров-информатиков на подготовку инженеров-мехатроников с углубленной специализацией по вышеуказанным направлениям. Практически каждое второе предприятие Германии находится в поиске инженеров. Сегодня на рынке они пользуются спросом, как никогда ранее. Можно сказать, что даже в самые сложные для рыночной коньюнктуры времена спрос на высоко-профессиональных и квалифицированных инженеров не снижался.
Хорошие перспективы на будущее имеют те, кто решил посвятить себя инженерным специальностям. На рынке труда интерес к работе инженера повсеместно расширяется. А с 2003 года в этом «забеге» инженер-мехатроник играет очень важную роль. Если вас интересует техника и вы хотели бы услышать, как «тикает» наш современный мир, если вас привлекает активная жизненная позиция, если вам интересно придумать что-то новенькое, для того чтобы улучшить существующее положение вещей, – профессия мехатроника, а в нашем варианте – автомобильного мехатроника – это, как говорится, «то, что доктор прописал». Мехатроник – это инженерная профессия «в квадрате» – очень правильный и, главное, современный выбор. Выбор в эпоху перехода человечества к универсальной автоматизации и роботизации.
Предпосылки для обучения
Для того чтобы пойти учиться на инженера-мехатроника в университет вы должны закoнчить школу и получить аттестат зрелости. Для обучения в вузе на инженера вам нужно «взять» с собой огромный интерес к таким естественным наукам, как биология, химия и, конечно же, физика. Вы также должны быть немножко математиком, необходимы глубокие знания и умения в обращении с компьютером и современным программным обеспечением.
Многие промышленные предприятия работают с филиалами по всему миру, и поэтому вам просто необходимо достаточно хорошее знание английского языка. Во времена глобализации рекомендуется помимо английского обратить внимание на иностранные языки вообще. Также с собой на обучение следует взять креативность, желание работать в команде, целеустремленность, а также ответственное мышление и действия.
Кто пока не успел освоить иностранный язык, не должен пугаться. Все вузы Германии предусматривают профессиональное обучение иностранным языкам, будь то университет или институт. Многие курсы по инженерным специальностям включают многомесячные практические проекты в различных компаниях по всему миру, в которых студенты должны обязательно участвовать. Как правило, такой практический семестр продолжается три месяца, но в зависимости от специализации и типа вуза он может длиться от шести месяцев до года.
Еще более детальную информацию по профессиональным возможностям и различным отраслям мехатроники вы найдете в наших следующих статьях, упражнениях и викторинах. Мы надеемся, что смогли дать вам общее представление о перспективах работы после выбора и обучения профессии мехатроника.
Владимир Смольников,
Александр Леонидович Шмайлов, подборка и перевод
Структура и принципы построения мехатронных систем.
Что такое мехатроника и ее определение.
Мехатроника – это новая область науки и техники, посвященное созданию и эксплуатации машин и систем с компьютерным управлением движения, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
В данном определении особо подчеркнуто приединая сущность мехатронной системы, в основу построения которой заложена идея глубокой взаимосвязи механических, электронных и компьютерных элементов. Поэтому эмблемой мехатроники ставят 3 пересекающихся круга, включенных в общую оболочку:
производство,
менеджмент,
требования рынка.
Таким образом, системная интеграция 3 указанных видов элемента является необходимым условием построения мехатронной системы.
Известно несколько определений мехатроники как науки.
Предлагается след специальная формулировка предмета мехатроники:
Мехатроника - изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, машин, систем и комплексов машин с интеллектуальным управлением с их функциональными движениями.
Пояснения к определению:
Мехатроника изучает особые методологический подход построения машин с качественно новыми характеристиками. Этот подход является универсальным и может быть применен в машинных системах различного назначения. Однако, следует отметить, что обеспечить высокое качество управления мехатронной системой можно только с учетом специфики конкретного управляемого объекта.
В определении подчеркивается синергетический характер интеграции составляющих элементов мехатронных объектов. Синергия - это совместное действие, направленное на достижение единой цели. При этом важно, что составляющие части непросто дополняют друг друга, а объединяются таким образом, что образованные системы обладают качественно новыми свойствами. В мехатронике все энергетические и информационные потоки направлены на достижение единой цели в реализации заданного управляемого движения.
Интегрированные мехатронные элементы выбираются разработчиком уже на стадии проектирования машин, а затем обеспечиваются необходимые инженерная и технологическая поддержка при производстве и эксплуатации машин. В этом отличие мехатронных машин от традиционных, когда пользователь зачастую был вынужден самостоятельно объединять систему в разнородные механические , электронные и информационные управляющие устройства различных изготовителей. Именно поэтому многие сложные комплексы показали на практике низкую надежность и невысокую технико-экономическую эффективность.
Методологической основой разработки мехатронных систем служат методы параллельного проектирования. При традиционном проектировании машин с компьютерным управлением проводятся разработка механической ,электронной , сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков. Особенность параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонентов системы.
Базовыми объектами изучения мехатроники является мехатронный модуль, который выполняет движения по одной управляемой кординате. Из таких модулей как из функциональных кубиков компануются сложные системы модульной архитектуры.
Мехатронные системы предназначены для реализации заданного движения. Критерий качества выполнения движения мехатронных систем – проблемное ориентирование, то есть определяется постановкой конкретной прикладной задачи. Специфика задач автоматизированного машиностроения состоит в реализации перемещений выходных звеньев рабочего органа технологической машины (инструмент на станке). При этом необходимо координировать управление пространством перемещения мехатронных систем с управлением различными внешними процессами.
Примерами таких процессов могут служить регулирование силового взаимодействия рабочего органа с объектом работ при механообработке, контроль и диагностика текущего состояния критических элементов мехатронных систем, управление дополнительными технологическими воздействиями на объект работ при комбинированных методах обработки, управление вспомогательным оборудованием, выдача и прием сигналов от устройств электроавтоматики. Такие сложные координированные движения называют функциональными движениями.
В современных мехатронных системах для реализации высокого качества и точности движения применяются методы интеллектуального управления. Данная группа методов опирается на новые идеи теории управления современным аппаратным и программным средством вычислительной техники, перспективные подходы к синтезу управляемого движения мехатронных систем.
Мехатроника как новая область науки и техники находится в стадии своего становления, ее терминология, границы и классификационные признаки еще строго не очерчены.
Мехатронные технологические системы: концепция проектирования и применение в современном машиностроении.
Бурное развитие мехатроники вызвано резко возросшими требованиями рынка к потребительским свойствам и качеству продукции современного машиностроения. Именно этот фактор определяет современные тенденции развития и стимулирует НТП в области мехатроники.
Таким образом, создание оборудования нового поколения на базе новых технологий для производства новых продуктов является ответом производителей на новые рыночные условия. В России в последние годы становлению мехатронике уделяется повышенное внимание. В марте 2002 г Путиным утвержден документ «Основы политики РФ в области развития и технологии на период 2010 г и в дальнейшей перспективе», где мехатронные технологии включены в число критических технологий РФ.
Новые требования, предъявляемые функциональным характеристикам технологических модулей и машин:
Сверхвысокие скорости движения рабочих органов машин, определяющие новый уровень производительности технологических машин
Сверхвысокие точности движения, необходимые для реализации прецизионных технологий (вплоть до микро- и наноперемещений)
Максимальная компактность конструкции и минимизация массогабаритных показателей модулей
Интеллектуальное поведение машин, функционирующих в изменяющихся и неопределенных внешних средах
Реализация быстрых и точных перемещений рабочих органов по сложным контурам и поверхностям
Существенное расширение технологических и функциональных возможностей оборудования желательно без увеличения его стоимости
Способность системы к реконфигурации в зависимости от выполняемой конкретной задачи или операции
Высокая надежность и безопасность функционирования
Передовой мировой уровень в области станкостроения можно оценить по новейшим образцам оборудования, которых ведущие производители представили на международной выставке в Японии в ноябре 2002 года. Приводные системы современных металлообрабатывающих станков обеспечивают следующие характеристики: скорость рабочей подачи до 15 м/мин, скорость холостого хода до 200 м/мин, ускорение приводов при разгоне до 3g, точность обработки порядка 2-3 микронов, число одновременно управляемых осей до 20 в одном обрабатывающем комплексе.
Очевидно, что для создания машин с такими техническими показателями необходимы принципиально новые подходы проектирования и производства приводных модулей и систем. К их числу в первую очередь следует отнести мехатронику.
Методология проектирования модулей и машин на основе мехатронного подхода направлена на синергетическую интеграцию элемента, представленную на рисунке.
Ключевой методологической идеей данного подхода является приоритет функции модуля над её структурной организацией и конструктивным решением. Применяя последовательно выполняемые процедуры функционально-структурного и структурно-конструктивного анализа мехатронных систем, разработчик оценивает принимаемые решения, стремясь добиться максимального уровня синергетической интеграции элементов.
Для использования методов автоматизированного проектирования формируют взаимосвязанные функциональную, структурную и конструктивную модели мехатронных модулей, затем планируют движение мехатронной системы в пространстве и во времени, оптимизируя их, например, по критерию максимального быстродействия. В рамках программы инновационного машиностроения ряд организаций приступил к созданию мехатронных машин нового поколения на базе мехатронных модулей.
Концептуальными проектами являются следующие:
Мехатронный обрабатывающий центр МС-630 на базе четырех модулей
ПМС-630 и высокоскоростного шпинделя iBAG завода им. Свердлова.
Обрабатывающие центры: МЦ-1, гексамех-1, МЦ-2.
Робот-станок РООТ-300 для шлифования турбинных лопаток.
Лазерный комплекс для послойного синтеза.
Мобильные технологические роботы для инспекции и ремонта трубопроводов.
Главными преимуществами данных мехатронных систем являются исключение многоступенчатого преобразования энергии и информации, упрощение кинематических цепей и следовательно высокая точность и улучшенные динамические характеристики, конструктивная компактность модулей и следовательно улучшенные массо-габаритные характеристики. Возможность объединения мехатронных модулей в сложные мехатронные системы, и комплексы, допускающие быструю реконфигурацию, относительно низкая стоимость установки, настройки и обслуживания системы, благодаря модульности конструкции, унификации аппаратных и программных средств, способность выполнять сложные движения, благодаря применению методов адаптивного и интеллектуального управления.
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающее воздействие на рабочий орган. Примерами таких воздействий может служить сила резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Устройство компьютерного управления осуществляет следующие основные функции:
Управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации.
Организация управления функциональными движениями мехатронной системы, которая предполагает координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами. Как правило, для реализации функции управления внешними процессами используются дискретные входы/выходы устройства.
Взаимодействие с человеком-оператором через машинный интерфейс в режимах автономного программирования (режим off-line) и непосредственно в процессе движения мехатронной системы (режим on-line).
Организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления в целенаправленное механическое движение с управлением на основе принципа обратной связи. Характерно, что электрическая энергия (гидравлическая, пневматическая) используется в современных системах как промежуточная энергетическая форма.
Построение мехатронных модулей на основе синергетической интеграции элементов.
Мехатронные модули – это базовые функциональные компоненты мехатронных систем и машин с компьютерным управлением, предназначенные для выполнения движений, как правило, по одной управляемой координате.
Качественно новые свойства мехатронных модулей по сравнению с традиционными приводами достигаются синергетической интеграцией составляющих элементов.
Синергетическая интеграция – это не просто соединение отдельных частей в систему с помощью интерфейсных блоков, а построение единого приводного модуля через конструктивное объединение и даже взаимопроникновение элементов, которые имеют, как правило, различную физическую природу.
Назначением мехатронных модулей является реализация заданного управляемого движения, как правило, по одной управляемой координате.
Мехатронные модули движения являются теми функциональными «кубиками», из которых затем можно компоновать сложные многокоординатные мехатронные системы.
Сущность мехатронного подхода к проектированию состоит в объединении в единый приводной модуль составляющих элементов. Применение мехатронного подхода к проектированию модуля движения базируется на определении возможных точек интеграции элементов в структуре привода. Выявив также точки интеграции можно затем на основе технико-экономического и технологического анализа принимать конкретные инженерные решения на проектирование и изготовления модуля движения. Приведем схему энергетических и информационных потоков в электромеханическом мехатронном
модуле.
На вход мехатронного модуля поступает информация о цели движения, которое формируется верхним уровнем системы управления, а выходом является целенаправленное мехатронное движение конечного звена, например, перемещение выходного вала модуля.
Для физической реализации электромеханического мехатронного модуля теоретически необходимы четыре основных функциональных блока последовательно-соединенные: информационно-электрический и электромеханический функциональный преобразователь в прямой цепи и электро-информационный и механико- информационныи преобразователи в цепи обратной связи.
Проанализируем физический характер преобразований и традиционную структуру электро-механического модуля с компьютерным управлением с этой же точки зрения.
УКУ на основании входной информации, поступающей с верхнего уровня управления и по цепям обратной связи от сенсоров, выдает во времени на исполняющие приводы управляющие электрические сигналы. В силовых преобразователях происходит усиление по мощности данных сигналов и их модуляция, затем исполнительные приводы прикладывают соответствующие усилия к звеньям механического устройства, что в результате вызывает целенаправленное движение конечного звена модуля с рабочим органом.
Для соединения элементов в систему традиционно вводят специальные интерфейсные устройства, обозначенные И1-И7.
Интерфейс И1 представляет собой комплекс аппаратно-программных средств для сопряжения УКУ модуля с верхним уровнем системы управления. Функции верхнего уровня управления выполняет высокопроизводительный компьютер либо человек-оператор.
Интерфейс И2 обычно состоит из цифро-аналогового преобразователя (ЦАП) и усилительно-преобразующего устройства и служит для формирования управляющих электрических напряжений для исполнительных приводов.
Интерфейсы И3 – это, как правило, механические передачи, связывающие исполнительные двигатели со звеньями механического устройства. Конструктивно такие трансмиссии обычно включают редукторы, муфты, гибкие связи, тормоза и т.п.
Интерфейс И4 на входе УКУ в случае применения в электромеханическом мехатронном модуле сенсоров с аналоговым выходным сигналом строится на основе аналоговых цифровых преобразователей (АЦП).
Интерфейсы сенсоров И5, И6, И7, в зависимости от физического характера наблюдаемых переменных можно разделить на электрические и механические. К механическим интерфейсам относятся присоединительные устройства для датчиков обратной связи приводов (фотоимпульсных, кодовых, тахогенераторных и т.п.), силомоментных и тактильных датчиков, а так же других средств очувствления и информации о движении звеньев механической цепи, двигателей и внешних объектов. Преобразование и передача сигналов о переменных состояниях системы, которые имеют электрическую природу осуществляется электрическими интерфейсами. В их состав помимо усилительно-преобразующих плат входят также соединительные кабели и коммутационная аппаратура.
Сравнивая представленные блок-схемы можно прийти к выводу о том, что число преобразующих и интерфейсных блоков в традиционной структуре привода с компьютерным управлением избыточно по отношению к минимально необходимому числу функциональных преобразований.
Этот вывод даёт основание для поиска новых решений построения привода, базирующегося на синергетической интеграции элементов.
Различие мехатронного и традиционного подхода к проектированию и изготовлению модулей и машин с компьютерным управлением состоит в концепции построения и реализации функциональных преобразователей. При традиционном проектировании интерфейсы представляют собой отдельные самостоятельные устройства и узлы. Обычно это сепаратные блоки, которые выпускаются специализированными фирмами но зачастую отдельные элементы приходится изготавливать самим пользователям. Мехатронный подход нацеливает разработчика на интеграцию элементов привода в единые блоки, минимизацию промежуточных преобразований и устранения интерфейсов как сепаратных блоков.
Построение ЭМММ на основе синергетической интеграции элементов
Следуя логики мехатр. Подхода потенциально возможным точкам аппаратной интеграции элементов можно отнести интерфейсные блоки И1 – И7 в структуре электромех. Привода.
| Механич. Модули И элементы | Составные части | Исключаемые элементы | |
| основные | Дополнит. | ||
| Приводной модуль | Исполнит двигатель | Силовой преобразователь | И3 |
| Метатр. Модуль движения | Приводной модуль | Силовой преобразователь | И5 |
| Интеллект. Сенсор | Сенсор | Микропроцессор | И4 |
| Интеллект. Мехатр. Модуль движения | Мехатр. Модуль движения | Усиливающее устройство | И2 |
Перспективный интерес для мехатроники представляет построение мехатронных модулей на базе нескольких точек интеграции что открывает огромные возможности для научного поиска
????
Рассмотрим типичные примеры однокоординатных модулей движения, разработанных для решения задач автоматизированного машиностроения.
Мотор – редукторы являются исторически первыми по принципу своего построения мехатр модулями, которые выпускаются серийно и находят широкое применение в приводах машин и механизмов.
Мотор – редуктор представляет собой компактный конструктивный модуль, объединяющий электродвигатель и редуктор .
Преимущества: Сокращение габаритных размеров, снижение стоимости и затрат на установку и наладку модуля. Конструктивное исполнение зависит от типа объединяемого редуктора и двигателя.
Сложным шагом в развитие приводной техники стало появление ВМД вращательного движения, которые позволили вообще исключить редуктор из состава Эл привода.
ВМД выпускаются коллекторного и вентильного типов (без щеточного)
Основной недостаток: наличие дорогостоящих магнитов и блок управление коммутацией обмоток.
Мехатроный подход к построению модулей вращательного движения получили свое развитие и в модулях линейного перемещения.
Мехатронные модули на основе линейных ВМД (ЛВМД) находят все применение в гексоподах, высокоскоростных станках в комплексах для лазерной и гидравлической резки,
Вспомогательном оборудование. Еще один недостаток всех ВМД и ЛВМД – необходимость в системе охлаждения и относительно невысокий КПД модуля.
Механотрон — Википедия
Материал из Википедии — свободной энциклопедии
Механотро́н — электровакуумный или газоразрядный прибор, в котором силой электронного или ионного тока можно управлять изменяя положение внутренних частей (электродов) механическим воздействием снаружи. Механотрон является одним из видов электронно-механических преобразователей. Предназначен для прецизионного измерения линейных перемещений, углов, сил и вибрации в контрольно-измерительных устройствах. Как правило, это разновидность диода.
Известны конструкции электронно-механических генераторов электрических синусоидальных колебаний инфранизких (и ниже) частот, где колебательным контуром служит камертон соответствующих размеров. Соединённый с камертоном механотрон преобразует механические колебания в изменения своего анодного тока.
- Механотроны с продольным управлением. Подвижный электрод перемещается вдоль линий электрического поля, а его плоскость остаётся перпендикулярной линиям поля.
- Механотроны с поперечным управлением. Направление перемещения подвижного электрода перпендикулярно линиям электрического поля.
- Механотроны с зондовым управлением. Используется дополнительный электрод (зонд), расположенный в пространстве между катодом и анодом или вблизи. Перемещение зонда сопровождается изменением электрического тока в его цепи. Наиболее распространены газоразрядные механотроны с зондовым управлением.
- Механотроны с дифференциальным управлением. Управление осуществляется перемещением анода внутри неподвижного отрицательного электрода (антианода), сопровождающееся изменением степени экранирования катода от анода.
- Механотроны с механическим управлением электронным лучом. Представляет собой электронно-лучевую трубку с электростатическим отклонением луча и с коллекторами электронов. Управление осуществляется перемещением одной из отклоняющих пластин или дополнительного электрода, приводящее к отклонению электронного луча и изменению тока коллекторов.
1 — анод подвижный
2 — катод
3 — подогреватель
4 — подогреватель
5 — анод неподвижный
6 — отсутствует
У советского двойного диода, механотрона 6МХ1Б положение одного из анодов (1 на схеме) можно изменить, нажимая на выведенный наружу металло-стеклянного корпуса через герметичную мембрану штырь. Соответственно, менялся анодный ток. Ток второго анода (5 на схеме) использовался как образцовый при построении мостовых схем. Лампа применялась, например, в весах-дозаторах.
Выпускался заводом МЭЛЗ, Москва.
Характеристики механотрона 6МХ1Б как датчика[править | править код]
(Из этикетки на прибор. Для указания сил используется единица «грамм-сила» (гс).)
- Статическая чувствительность по току к перемещениям — не менее 20 мкА/мкм
- Диапазон измеряемых перемещений — 0…140 мкм
- Статическая чувствительность по току к силам — не менее 2,5 мА/гс
- Диапазон измеряемых сил — ±0,5 гс
(буква «Х» в названии — двойные диоды)
- 6МХ1Б — 1 подвижный анод (см выше)
- 6МХ1С — 2 подвижных анода
- 6МХ2Б
- 6МХЗС, 6МХ4С, 6МХ5С — 2(?) подвижных анода
- 6МУХ6П — 2 подвижных анода для измерения угловых перемещений
- 6МН1Б — двойной триод, 1 подвижный анод